



基於最優匹配區域的結構光係統的投影儀標定
2017-5-26 來源:湖(hú)北文理學院(yuàn)機械與汽車(chē)工程學院 作者:王中任 萬仁全 劉亞俊
摘要:針對現有的投影儀標定算(suàn)法精度不高的問題,根據(jù)投(tóu)影儀的非(fēi)線性模型,提出一種基於最優匹配(pèi)區域的新投影儀(yí)標定算法。首先通過試驗得到最優匹(pǐ)配區域,然後在最優匹配區域內計算角點的局部單應性矩陣,最後采用相機標定的方法對投影儀進行亞像素級(jí)標(biāo)定。實驗結果表明,該方法標定過程簡便,投影儀標定誤差最大為01 061 7 pixel,算法(fǎ)的執行時間為01 907 s,係統(tǒng)三維重構的(de)點雲密(mì)度達91 4 個/mm2。該方法隻需要普通的平麵標(biāo)定板,操作簡單,可滿足高精度(dù)的(de)三維測量係統要求。
關鍵詞:結(jié)構光測量;三維重(chóng)構;投影(yǐng)儀標定;局部單應性
1.引言
由於其非接觸、自動化程度高(gāo)、速度快(kuài)、高精度等優點,結構光三維測量在(zài)產品設(shè)計(jì)與製造(zào)、質量檢測中獲得了廣泛應用[1 -3]。在結構光(guāng)三維測量係統中,投影儀標定技術是獲(huò)得高精度的三維測量最基本和關鍵的環節[4],它主要包括投影儀的內參標定,以及投影儀和攝像機坐標(biāo)係之間變換矩陣的確(què)定。文獻[5]標定精度較(jiào)低,難以實(shí)現(xiàn)高精度的測量。文獻[6]要求標定過程中移動投影儀,限製了其應用場合。文(wén)獻[7]標定過程複雜,且不易(yì)實現。文獻[8]成本昂貴,難以(yǐ)在實(shí)際工程中應用。文獻[9]在計算單應性矩陣時耗時很長,造成整個標定程序效率不高,而(ér)且算法對結構(gòu)光解碼精度要求很(hěn)高(gāo),對解碼誤(wù)差(chà)的魯棒(bàng)性不強,因此很難適應(yīng)工業現場的高實時性和高可靠性要求。
本文在現有的算法基礎上,提出一種基(jī)於(yú)最優匹配區域的結構光係統中投影儀標定算(suàn)法,先用最優匹配區域計算每個(gè)角點的局部單應性矩陣,然後由投影儀的線性針(zhēn)孔模型和非線性畸變模(mó)型標定出投影儀的內參矩陣(zhèn),最後用傳統(tǒng)的雙目標(biāo)定方(fāng)法得到投影儀-攝像機的外參矩陣。實驗表明本方(fāng)法適用於大視場、高精度的(de)三維實(shí)時測量,很好地解決了上述方法在實時性和可靠性方麵(miàn)的不足,不僅操作簡(jiǎn)單易行,而(ér)且大大提高了係統(tǒng)的標定(dìng)精度和係統魯棒性。
2.標定原(yuán)理和算法流(liú)程
2.1投影儀的理想針孔模型
按照前(qián)麵所述(shù),投影儀看作一個逆向的攝像機,所以投影儀(yí)模型可用與攝像(xiàng)機相同的理想(xiǎng)針孔(kǒng)模(mó)型表示,基於單攝像機-單投影儀的結構光三維(wéi)測量係統如圖1 所示。
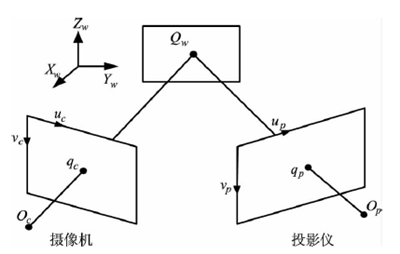
圖1 結構光係統示意圖(tú)
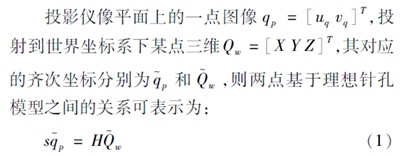
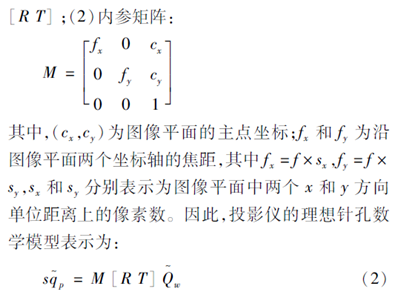
式中,參數s 為尺度係數;H 為單應性矩陣,表(biǎo)示(shì)為世界坐標係與投影儀像平麵坐標之間的映射關係,由兩部分組成:(1 )外參矩陣:即投影儀坐標係同世界坐標係之間的(de)旋(xuán)轉矩陣R 和平移向量T,表示為
2.2投影儀的畸變模型
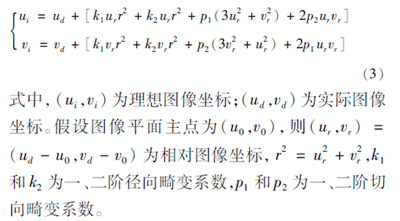
在(zài)設計、加(jiā)工和組裝光學鏡片等過程中不可(kě)避免地會導(dǎo)致鏡頭非線性畸變,從(cóng)而導致實際的成(chéng)像點與理想成像點存在誤(wù)差,這時(shí)在標定過程中需(xū)要引入畸變因子進(jìn)行校正。這裏主要考慮鏡(jìng)頭的切向畸(jī)變(biàn)和(hé)徑向畸變[1 0],模型表示如下:
2.3標定方法
盡管投影儀在參數標定部分可(kě)以采用與攝像機完全一樣的數學模型,但卻無法直接得到平麵棋(qí)盤標定板上每個角點的投影儀像平(píng)麵下的像素坐標。因此,投影儀標(biāo)定的首要難題是如(rú)何(hé)確定在投影儀投影平麵上由像素點對應的空間三維坐標。如(rú)圖2 所示,本(běn)文(wén)先把平麵棋盤標定板以某姿態放(fàng)置(zhì)在空間世界(jiè)坐(zuò)標係中,將水平和豎直的格雷碼條紋按不斷細分的次序投射到標定板上,相機捕獲到圖片後,先利用由文獻[1 1 ]的方法計算出的直接光分量和間接光分量來進行光條紋閾值分割,然後由格雷碼解(jiě)碼算(suàn)法得(dé)到投影儀像平麵每個點的像素坐標。利用不同匹配區域,使得攝像(xiàng)機像平麵與投影儀像平麵之間的單應性矩陣泛函數取得最小值來獲得最優化單應性矩(jǔ)陣,得到標定板每個角(jiǎo)點的投(tóu)影儀像平麵下的像素坐標。
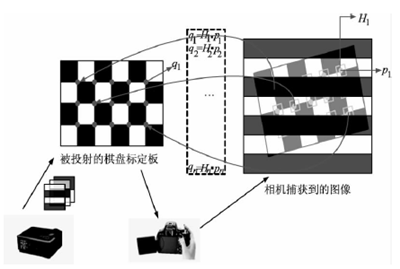
圖2 結(jié)構光係統標定示(shì)意圖
標定投影(yǐng)的具體流程如下:
(1 )平麵棋盤標定板以某姿態放置在空間世界坐標係中,投影(yǐng)儀投射出42 幅格雷碼結構光圖案到平(píng)麵棋盤標定板,投射的次序是1 幅全白、1 幅全黑、20 幅水平方向、20 幅豎(shù)直方向格雷碼結構光圖案,並且依(yī)次(cì)被相機所捕獲。
(2)使(shǐ)用第一(yī)張標定板圖像,提取棋盤標定板角(jiǎo)點的亞像素級的坐標(xc,yc)。
(3)設S ={I1 ,I2,…,Ik}為輸入的格雷碼結構光條紋圖像(xiàng)序列,p 為圖形上的某(mǒu)個像素點,點p 的直接光分量和間接光分量分別為Ld(p)和(hé)Lg(p),則有(yǒu):
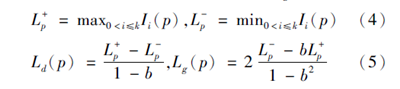
其中,b ∈ [0,1 ),是由(yóu)投影儀投射的暗條紋灰度值決定的。利用圖像每個像素點(diǎn)的Ld(p)和Lg(p),對圖像(xiàng)中(zhōng)的格雷碼條紋進行亞像素(sù)級閾值(zhí)分割,然後用格雷編碼的逆過程對閾值(zhí)分割後的圖像進行解碼,得出每個投(tóu)影儀圖像上的(de)每個像素點坐標(biāo)。
(4)設點a 為相機圖像上的某一個像素點,b 點(diǎn)為a 對(duì)應(yīng)在投影儀圖像平麵(miàn)上的像素點,a 和b 在各自像平麵的齊次像素(sù)坐標為:
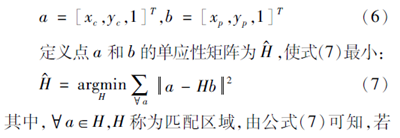
匹配區域H 過大(dà),使得該式收斂速度很慢,算法效率低下;而匹配區域H 過小,又會對(duì)標定的精度有不利的影響。故(gù)本文通過實驗定量地研究了匹配區域(yù)的大小同投影儀標(biāo)定算法(fǎ)的精度和效(xiào)率之間的關
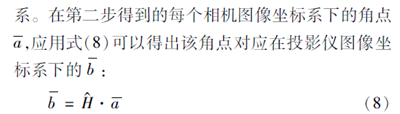
這樣,可以求出每(měi)個在相機圖像坐標係下的角點亞像(xiàng)素坐標(xc,yc)對應在投影(yǐng)儀圖像(xiàng)坐標係下的亞像素坐(zuò)標(xp,yp)。
(5)在相機和投影儀的視野範圍內,盡量較大程(chéng)度改變標定板的空間姿態,重複以上步驟,得到至少3 組不同標定板姿態圖片。由於本標定方法使用的是每個標定板角點坐標,而並非是整個(gè)棋盤標定板平麵,因此適用於22 節(jiē)非線性投影儀模(mó)型。最後利用張正友的相機(jī)標定方法來對投(tóu)影儀的內外(wài)參數進行標定。
3.標定實驗及結果分析(xī)
3.1標定實驗
使用圖3 所示的三維測量係統對本文所述的投影儀標定算法進行測試(shì)驗證,該係統由一個DLP 投影儀(型號為(wéi)BenQML6277,所選分辨率為1 024 ×768)和單(dān)反相機(型號為Cannon EOS650D,所選分辨率為51 84 ×3456 )組(zǔ)成;標定的軟件環(huán)境為opencv -243 和VS201 0。標定過程中,按照上述(shù)步驟從6 個不同棋盤標定(dìng)板姿態來采集圖像,其中圖4 為實驗中三組標定板不(bú)同空間姿態下的水平和豎直格(gé)雷碼解碼結果,圖5 為由對應姿態下投影儀反投影生成的虛擬(nǐ)圖像。

圖3 結構光測量係統
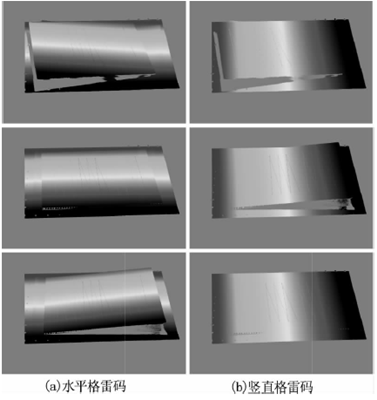
圖4 水平和豎直格雷(léi)碼解碼結果
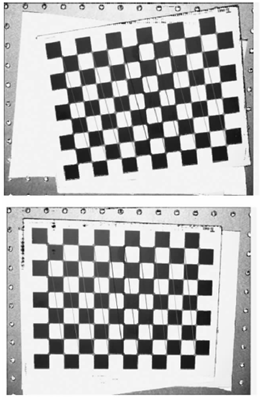

圖5 投影儀反投影生成的虛(xū)擬圖像
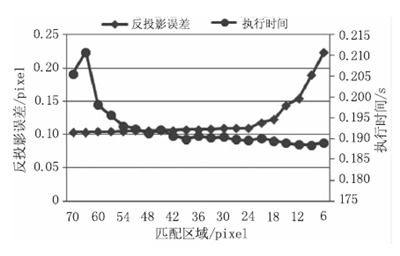
設定不同的匹配區域,用反投影誤(wù)差來衡量投影儀的標定精度;用標定算子執行的時間(jiān)來衡量投(tóu)影儀的標定效率,反投影誤差和執行(háng)時間結果(guǒ)如圖6 所(suǒ)示。
3.2實(shí)驗結果分析
由實驗結果(guǒ)可知,匹配區域由70 pixel 降到24pixel 時,投影儀標定算子的反投影誤差升高了0005584 pixel,最大反投影誤差(chà)為01 09089 pixel(匹配區域為24 pixel 時),相比最小反投影誤差01 03505 pixel (匹配區域為65 pixel 時)增大了5395%,因此可知,出在此區間內,匹配(pèi)區域的(de)增大並(bìng)沒有顯著降(jiàng)低投影儀標定的精度。但是當匹配區域由24 pixel 降到6 pixel 時,投影儀(yí)標定算(suàn)子的反投影誤差升高(gāo)了01 1 41 92 pixel,最大反投影誤差(chà)為0223281 pixel(匹配區域(yù)為6 pixel 時),相比最小反投影誤差01 09089 pixel(匹配(pèi)區域為24 pixel 時)增大了1 04678%。由(yóu)此分析可知,投影儀標定算法(fǎ)有個最優匹配區域的取值範圍,若是小於該範圍,會(huì)造成標定精度的(de)大幅度降低。
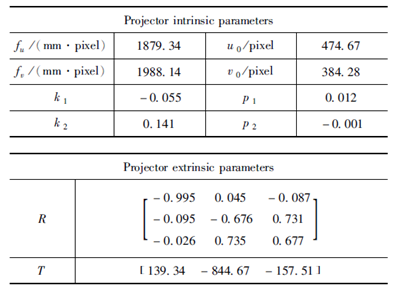
在算子執行時間方(fāng)麵,匹配區域由70 pixel 降到42 pixel 時,投影儀標定算子的執行時間降(jiàng)低了00201 s,最長執行時間為021 08s(匹配(pèi)區域為65pixel 時),相比最(zuì)短執行時間01 907s(匹(pǐ)配區域為42 pixel 時)要長1 0540%;但是當匹配區域由42pixel 降到6 pixel 時,投影儀標定(dìng)算子(zǐ)的執行時間隻降低了00023 s,最長(zhǎng)執(zhí)行時(shí)間為01 907 s(匹配區域為42 pixel 時),相比最短執行時間01 884 s(匹配區域為9 pixel 時)要長1 221 %。由理論原理和實驗(yàn)結(jié)果分析可知,計算單應性矩(jǔ)陣時(shí)的匹配區域對投影儀標定的效率和精度有很大的影響,在本實驗硬件條件下(xià),匹配區域選擇24pixel 至48 pixel 時,保證了標定的精(jīng)度同(tóng)時兼顧標定(dìng)效率,是理想的匹配區(qū)域範圍。因此,選取匹配區域為42 pixel 作為最佳匹配(pèi)區域,反投影誤差ep =01 061 7,標定得到的投(tóu)影儀外參和內參如(rú)表1 所示,圖7 為使用該標定結果來進行的三維重構實驗結果。
表(biǎo)1 投影(yǐng)儀標定結果
圖(tú)7 三維(wéi)重(chóng)構結果
4.結(jié)論
在由攝像機-投影儀組成的結構光三維測量係統中,相機的標(biāo)定和投影儀的標定是獲得高精度測量結果的關鍵。本文將投影儀當作一個逆向的相機,建立了投影儀模(mó)型,由於使用的是未標(biāo)定的攝像(xiàng)機(jī),故投(tóu)影儀的標定精度不受攝(shè)像機標定誤差的影響。標定算法中的投(tóu)影儀像素與攝像機像(xiàng)素之間的匹配區域對標定的效率和精度有很大的影響,本文通(tōng)過實驗定量地研究了匹配區域與精度和效率之間的關係,並分析得出了在本實驗硬件條件下的最佳匹配區域。實驗表明,在最佳匹配區域下,投影儀的(de)標定精度達到01 061 7 pixel,效率為01 907 s。在對三維測量(liàng)係統進行攝(shè)像機和投(tóu)影儀標定(dìng)後,對一個尺寸為20 mm ×20 mm ×20 mm 的標準塊進行(háng)三維重構,得到的三維點雲密度為91 4 個/mm2,擬合可得標準塊的(de)邊長為最終重構20072 mm,測量絕對精度為0072 mm。
投稿箱:
如果您有(yǒu)機(jī)床行業、企業相關新聞(wén)稿(gǎo)件發表,或進行資訊(xùn)合(hé)作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
如果您有(yǒu)機(jī)床行業、企業相關新聞(wén)稿(gǎo)件發表,或進行資訊(xùn)合(hé)作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
更(gèng)多相關信息

業界視點
| 更多
調查")
行業數據
| 更多
- 2024年11月 金(jīn)屬(shǔ)切削機床產量數據
- 2024年(nián)11月 分(fèn)地區金屬切(qiē)削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年(nián)11月(yuè) 新能源汽車銷量情況
- 2024年10月 新能源汽(qì)車產量數據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車(chē)銷量情(qíng)況
- 2024年(nián)8月 新(xīn)能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據
博文選萃
| 更多
- 機械加(jiā)工過程圖示
- 判(pàn)斷一台加工中心精度的幾(jǐ)種辦法
- 中(zhōng)走絲線切割機床(chuáng)的發展趨勢
- 國產數(shù)控係統和數控機床何去何從?
- 中國的技術工人都去(qù)哪裏了?
- 機械老板(bǎn)做了十多年,為何還是小作(zuò)坊?
- 機械(xiè)行業最新自殺(shā)性營銷,害人害己!不倒閉才
- 製造業大逃(táo)亡
- 智能時代,少談點智(zhì)造,多談(tán)點製造
- 現(xiàn)實麵前,國(guó)人沉默。製造業的騰飛,要從機床
- 一文搞(gǎo)懂數控車床加工刀具補償功能
- 車床鑽孔攻螺(luó)紋加工方法及工裝設計
- 傳統鑽削與螺旋(xuán)銑孔加工工藝的區別