式3D掃描儀")



三維光電(diàn)振動(dòng)測量技術的校準方法研(yán)究
2017-1-18 來源:寧(níng)波舜宇智能科技有限公司 作者:錢向偉,王雷,張深逢,葉崗,宋雲峰
摘要(yào):為了分析三維光電振動測量儀測量的三維數據準確性,提出了一種利用標準小球做相對校(xiào)準的簡便方(fāng)法。組成三維光電振動測量(liàng)儀的5台激光(guāng)測振儀發出(chū)的5束激光同時經過1個透鏡,聚焦在位於透鏡焦點處且安裝在振動源上的標準(zhǔn)小球球麵上,軟件處理小球振動(dòng)時的三維分量,並與小球3個正交方向(xiàng)放置的3台激光測振儀測(cè)得的數據對比。通過微調(diào)小球的擺放位置,測量小球(qiú)不同振動方(fāng)向的三維振動信息,最後對數據進行誤差分析(xī),測量結果驗(yàn)證了(le)該校準方法的可行性和適用性。
關鍵詞:三維光電振動測量;正交法(fǎ)測量;標(biāo)準小球;激光測振儀
0.引言
三維光電振動測量儀作為高端科學儀器,廣泛應用於衛星陀螺控製器的振動測量、航空發動(dòng)機的葉片振(zhèn)動測量、火炮發射(shè)時炮管的(de)振動測量(liàng)、微機電(diàn)係統振動測量等,屬於(yú)非接觸測量儀器。然(rán)而,長期以(yǐ)來我國的光電振動測量(liàng)儀幾乎完全依賴進口,部分(fèn)產品由於牽涉(shè)到國防和國家安全領域還無法進口,這一局麵極大地限製(zhì)了我國相關領域的(de)發展。為此,研製具有自主知識產權的(de)三維(wéi)光電(diàn)振動測量儀(yí)迫在眉睫。
由於三維測(cè)振技術發展得較晚,目前國內外對振(zhèn)動校準裝置的研究還局限於采用單分量(liàng)激勵(lì)下的分軸向振動校準。然而(ér),采用傳統的(de)單分量振動(dòng)校準裝置校準三分量測(cè)振(zhèn)儀具有一定的局限性(xìng),三分量測振儀的靈(líng)敏度是一個矩陣形(xíng)式,若采用單分量振動(dòng)校準裝置將無法得到這(zhè)個輸入、輸出的耦合關係,而(ér)傳統(tǒng)的對多(duō)分量測振傳感器(qì)逐分量(liàng)校準方法,存在校準時間長、工作效率低且結果可靠性差等不足。在傳統激光測量技術中,無論是單點測量還是(shì)整個麵的掃(sǎo)描測量,都隻給出了物體的結構振動特性,沒有給出物體整(zhěng)體的三維振動特性。最近幾年出(chū)現的三維激光測(cè)振儀,主要由3台(tái)單點(diǎn)激光測(cè)振儀組成,能夠測量物體三維(wéi)振動信息,該測量技(jì)術的缺陷是儀器沒有自校準功(gōng)能[1之]。本文提出一種新型三維運動姿態測量方(fāng)法,通過(guò)5台單點激光測振儀實(shí)時測量物體三維振動信息和運動姿態,利用比較測量方(fāng)法對係統進(jìn)行相對校準,同時還能夠進行現場自校準,測量精(jīng)度高[3。4]。
1.基本原理
1.1激光測振(zhèn)儀(yí)原理
激光多普(pǔ)勒(lè)測振儀是基於光學幹涉原理。He-Ne激光器發(fā)出的偏振光(設頻(pín)率為Fo)由分光鏡分成兩路,一路作為測量光(guāng),一路作為參考光。測量光通過聲光調製(zhì)器後具有一固定的頻移(F),再聚焦到被測物體表麵,物體振(zhèn)動引起(qǐ)頻移(廠)。由於多普勒頻移f=2v/A,即,與速度口成正比(bǐ)變化。傳感器獲得的幹涉信號頻(pín)率為F+廠,攜(xié)帶了被(bèi)測物體的振動信息,再經過頻率電壓轉化,頻率信號變為電壓信號(hào)U,由於該轉(zhuǎn)化為線性(xìng)關係,即

1.2三維光電振動(dòng)測(cè)量技術(shù)原理
振動係統包括了5組激光測振組件(5台激光測振儀),其結構及光路如圖1所示,它們(men)共用(yòng)一個聚焦係統,使得激光測振組件出射的激光匯聚到同一點[8]。5組激光(guāng)測振組件采(cǎi)用正交對稱放置,構成十字(zì)分布。每個測量點(diǎn)均由5束激光同時測量,軟件(jiàn)處理並輸出X,y,Z 3個方向的(de)振動結果。
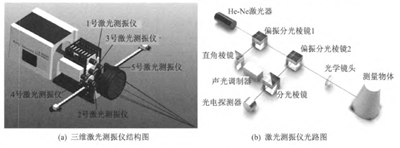
圖l 三(sān)維激光測振儀原理圖
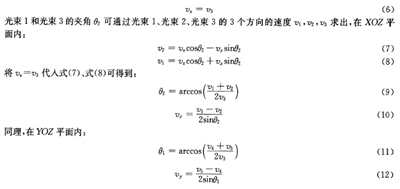
三維激光測振(zhèn)儀(yí)在測量物(wù)體三維信息時,5束激光通過聚焦透鏡匯聚在同一點,並測得沿各自光束方向的速度分別為V1,V2,V3,V4,V5,如圖2(a)所示,選用其中正交的3束激光來獲得三維振動信息呻(shēn)0|,此處選(xuǎn)用光束2,3,4,如圖2(b)所示,光束3可以(yǐ)直接(jiē)測量(liàng)物體沿Z方(fāng)向的振動分量,即
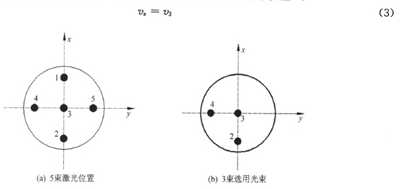
圖2激光束位置不意圖

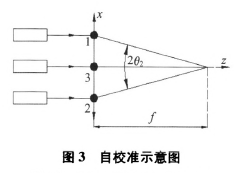
在實際裝(zhuāng)配和組裝調試過程(chéng)中,保證光束1和光束2關於(yú)光束(shù)3對稱,夾角為202,光束4和光束5關於光(guāng)束3對稱,夾角為2口。,但角度日。和晚(wǎn)的實際值和理論值會存在一定的誤差,本係統通過同一水平分(fèn)布的3束激光實(shí)現三維光電振動測量儀的自校準功能,如圖3所示。校準時,一般采用振動台(tái)沿Z軸方向振動,實際校準過程(chéng)中,振動台由於擺放誤差,很多情況下也會有沿X軸方向的(de)振動分量口:,通過光束3可以(yǐ)測得Z軸方向振動速度為
整個係統實(shí)現了角度的自校準過程,當5束激光聚焦在被測物體上,5個(gè)通道同步采集物體(tǐ)的振動信息,根據式(6)、式(10)、式(12)可計算出物體的(de)三(sān)維振動坐標哦,碼和口。。
2.係統校準以及實驗過程
2.1係(xì)統校準
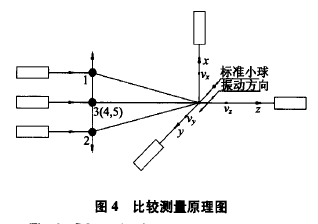
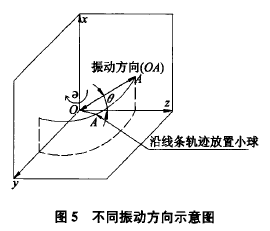
在激光測振過程中,當物體的振動方向沿著激光方向時,測量值為準確的振動值(zhí)。為測量物體的三維分量,要盡量減少測量點3個(gè)方向的固有誤差,可在振(zhèn)動源上固定一個標準的小球(qiú),振動源為標準的振動傳感器校準儀,內部可產生不同頻率的正弦信號,可(kě)輸出顯示加速度、速度及位移3種振(zhèn)動信號的幅值[1卜121;三坐標測量機上用於校正振動儀器的標準小球直徑為20 mm,材料為(wéi)鋼(gāng),表麵覆蓋有(yǒu)一層0.1 1Tlln厚的均勻反(fǎn)射膜,另外選取3台(tái)一致性良好,即(jí)測試同個物體振動信息相同或接近的激(jī)光測振儀,分別放置於正交係的X,y,z方向,用於物體3個方向(xiàng)振動信息數據測量,正交位置(zhì)通過機械裝(zhuāng)置實(shí)現,控製3個方向相(xiàng)互都成90。角,並且由於各個方向(xiàng)的激(jī)光測振儀利用散射原(yuán)理測量,正交性的微小(xiǎo)角度偏差對測量結果影響不(bú)大(dà);然後(hòu)打開振(zhèn)動源,讓小球(qiú)在振動(dòng)源作用下以不同頻(pín)率和不同幅值振動,比較不同條件下3台激光測振儀與(yǔ)三維光電振動測量儀(yí)所測數據,從而判斷其測量數據的準確性,測量原理如圖4所示。三(sān)維光電振動(dòng)測量儀的5束激光(guāng)聚焦在球麵上,光束3與接觸點的切麵基本垂直,正交方向的3台激光測振儀也聚焦在球(qiú)麵上,分別與接觸點切麵垂直,小球在不同位置下的數據穩定後,比較三維光電振動測量儀采集(jí)到的三維分量%,q,鞏的數據與X,y,Z 3個方向的激光測振儀采集的數據,如圖5所示。
2.2實驗過程
首先將標準小球固定在振動源上(shàng),三維光(guāng)電振動測量儀聚焦透鏡焦距為500 mm,調節振動台的位置,使5束激(jī)光聚焦在小球的球麵上,光束3方向為(wéi)正交坐標係的Z方向(xiàng),將另外3台激光測振儀分別放置於小球所在坐標係的X、y、Z方向,工作距為500 mm,調節(jiē)振動源上的頻(pín)率以及速度幅值,得到多組不同頻率,不同幅(fú)值下小球的(de)振動信息;再固定振動源幅值和(hé)頻率不變,改(gǎi)變小球的振動方向(xiàng),三維分(fèn)量的幅值大小發生改變;重複上述操作,最後比較測量數據。標準振動源放置在機械工裝上,通過微調機械工裝(zhuāng),將振動源(yuán)的振(zhèn)動方向平行於XOZ平麵,並使振(zhèn)動方向與Z軸方向(xiàng)成(chéng)0角度,然後移動工裝使物體振動方向繞X軸旋轉a角度,測量其三維振動(dòng)信息,最後進行(háng)數據分析。
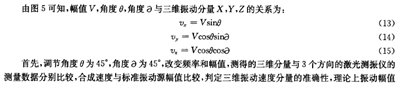
一定的(de)前提下,頻率(lǜ)不影響速度分量值;再選取一定的頻率和幅(fú)值,改變2個角度值(zhí)的大小,測試三維振動對任意方向的振動物體的適用性(xìng)。
3.測量結果分析(xī)
3.1測量結果(guǒ)
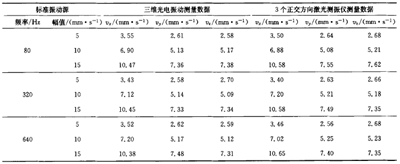
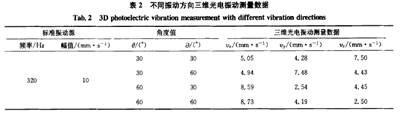
首先(xiān)調節振(zhèn)動源的擺放位(wèi)置,為了方便計算(suàn)和比較,使小球振動方向滿足(zú)角度口(kǒu)為45。,角度(dù)a為45。,然(rán)後調(diào)節(jiē)振動源的頻率(lǜ)和幅值(zhí),在(zài)不同頻率、不同幅值下(xià),三維光電振(zhèn)動儀和3個正交方向上的激光(guāng)測振儀測量數(shù)據如表1所示;然後振動源選取固定的頻率和幅值,此處選擇頻(pín)率320 Hz,幅值10 mm/s,在不(bú)同(tóng)角度下,小球不同振動方向的三維光電振動(dòng)儀(yí)測量數據如(rú)表2所示(shì)。
表1同一振動方向(0=0=45。)。不同頻率。不同幅值測量數據
3.2數據(jù)和誤差分(fèn)析
小(xiǎo)球在同一振(zhèn)動方向下,即角度日為45。,角度(dù)a為45。,三維光電振動測量儀的三維分量合成值與3個正交方向激光測振(zhèn)儀測量數據的合成值分(fèn)別與振動源的幅值做比較,誤差分析(xī)結果(guǒ)如表3所示。在振動源頻(pín)率320 Hz,幅值10 mm/s的條件下,根據小球不同振動方向的三(sān)維光(guāng)電測(cè)量數據,由式(13)、式(14)、式(15)計算出小球實際角度值日和a,並分別(bié)與理論角度值進行比(bǐ)較,誤(wù)差分析結果如表4所示。可以看出,三維光電振(zhèn)動(dòng)測量儀的3個分量與3個方向激光測振儀的測量數據基本吻合,合成值的(de)誤差最大為2.87%,任意方向的角度(dù)誤(wù)差最大為1.35%。在實際(jì)測量過程中,3個方(fāng)向激光測振儀在保證光(guāng)斑(bān)基本處在小球的對應位置時,擺(bǎi)放位置引起的誤差很小(xiǎo),可忽略不計,而機械調節工裝會引入係統誤差,結構(gòu)加(jiā)工和透鏡成像質量也會影響測量結果,但總體而言(yán),測量結果誤(wù)差滿足(zú)係統要求,符合相對(duì)測量的標準。
表3同一振動方(fāng)向(0=a----45。)測量數據誤差分析
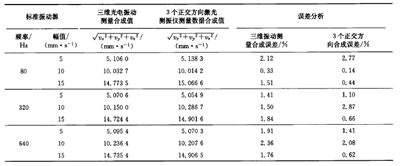
表4不同振動(dòng)方向三維光(guāng)電振(zhèn)動測(cè)量數據誤差分析

4.結論
在研究(jiū)了三維光電振動測量儀原理的基礎上,選取振動源和(hé)單點激光(guāng)測振儀作為比較對象,搭建了實驗平台進(jìn)行數據測量和誤差(chà)分析,驗證了三(sān)維光電振動測量儀對任意空(kōng)間物(wù)體三維分量測(cè)量的相對準確性和適用性,但後續仍需標準的三軸計量平(píng)台對測量數據進行(háng)絕對校準。
投稿箱:
如果您有機床行業、企(qǐ)業相關(guān)新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企(qǐ)業相關(guān)新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關信息

業界視點
| 更多

行業數據(jù)
| 更多
- 2024年11月 金屬切削機床產量數據(jù)
- 2024年11月 分地區金屬(shǔ)切削機床產(chǎn)量(liàng)數據
- 2024年11月 軸承出口情況
- 2024年11月 基本(běn)型乘(chéng)用車(轎車)產量數據
- 2024年11月 新能源汽車(chē)產量數據
- 2024年(nián)11月 新能源汽車銷量情況
- 2024年10月 新(xīn)能(néng)源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月(yuè) 分地區(qū)金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據
博文選(xuǎn)萃
| 更多