精機")



五軸加工中心的編(biān)程革新研究
2018-10-19 來源: 茂名市交通(tōng)高級(jí)技工學(xué)校(xiào) 作者:範利洪
摘(zhāi) 要:五(wǔ)軸聯(lián)動數控機(jī)床可以實現零(líng)部件的自動化加工,但是針對數(shù)控編(biān)程的研發和使用還存在很多問題。研究五軸加工中心的數控編程理論基礎以及前置和後置處理。
關鍵詞:五軸加工;數(shù)控編程(chéng);後置處理;數據加工
0 前言
數(shù)控技術是在生產過程中應(yīng)用數字控製方法實現生產(chǎn)過(guò)程自動(dòng)化控(kòng)製的(de)一種(zhǒng)技術。在數控編程(chéng)中主體是數控機床,數控機床全(quán)稱(chēng)是數(shù)字控(kòng)製機床,是在自動化機床中裝入程序控製係(xì)統,控製係統是用來對控製編碼和(hé)指令程序進行處理的。
1 、五軸加工(gōng)數控編程技術分析
數控編程技術的每一個過程都是(shì)緊密結合的,任何一個環節出現了問題,都會影響零件整體加工的質量。數控編(biān)程流程見圖1.
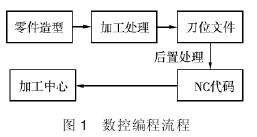
在數控編程流(liú)程中可以看到(dào)數控編程(chéng)的主要過程。在(zài)零件製造過程中(zhōng),首先要(yào)通過曲線(xiàn)編輯和實體建模等技術,完成(chéng)複雜零件的造型設計。
在加工處理中為保證數控加工的質量,首先要對加工的工藝參數進行(háng)優化選擇,另外刀具(jù)的控製方式和走(zǒu)刀路線的優化選擇(zé)也是數控編(biān)程過程的重點問題,刀具(jù)軌(guǐ)跡(jì)的生成(chéng)也是比較重要的,走刀軌跡在三維軟件中可以(yǐ)完成,但是不同的軟件達到的效果也是不相(xiàng)同的(de),在數控編程(chéng)中,走刀軌跡的軌跡(jì)代碼是一個重點內容(róng),要按照軌跡光滑和切削複合滿足軌跡(jì)要求進行設計(jì),複合生成(chéng)代碼量少並且代碼質量(liàng)高原則。
數控編程後置處理技術也是數控編程的重要技術,數控編(biān)程(chéng)後置處理可以(yǐ)保證零件加工的質量,保證機床可以安全可靠的(de)運行。
在數控編程技術的研究中對後置處(chù)理的研究比較多,比如多坐標軸數控加工中心的後(hòu)置處理算法研究,在多坐(zuò)標軸(zhóu)數控機床模型(xíng)建立(lì)基礎上對(duì)機床幾何誤差的(de)後置變換研究(jiū)等。
在(zài)針對數控編(biān)程係統的研究(jiū)中,提出了數控自動編程係統的後置處理程序的結構設計。
2 、五軸聯動高速加工中心研究
2.1 五軸加工中心機床研究
在高速(sù)數(shù)控加工領域中,五軸聯(lián)動高速加工作為主要的技術,五軸聯動加工中心的最高轉(zhuǎn)速可以達到(dào) 13 萬 r/min。以UCP 係列機(jī)床為例,UCP 係列機床是高精度零件的加工機床,在設計和生產中都是采用最新(xīn)的材質和最新的技術,這樣在多(duō)軸零件進行加工(gōng)的時候,可以滿(mǎn)足高動態性能的需求 。
UCP 係(xì)列機床五軸加工中心機床參數,數控係統采用 i TNC530;換刀裝置 HSK 40 刀位數是 36,HSK 63 刀位數是 30,ISO 40刀位數(shù)是 30;工作台采用尺寸是 600 mm×600 mm
的 ClampingSurface,工作台承(chéng)重 500 kg;X,Y 坐標軸的進給速度和快速移動速度分別是 20 m/min 和 30 m/min,Z 坐標軸方向進給速度和(hé)快速移動速度分別是 20 m/min 和 30 m/min; UCP 係列機床工作範圍 X 軸縱向行程 800mm,Y 軸縱(zòng)向行程 650 mm,Z 軸縱(zòng)向行程 500 mm。
在(zài)坐標軸平移的變化中,UDP 係列機床是五軸聯(lián)動的,具有 5 個坐標軸的坐標,其中 3 個是平(píng)移坐標軸的坐(zuò)標,另外 2 個是旋轉坐標軸的角度坐標,五軸加工中心決定 2 個旋轉坐標的坐標軸,在五軸聯動的(de)運動方式中,空(kōng)間運動的向量有 6 個自由度,圖 2 為空間 6 自由度表示的坐(zuò)標(biāo)圖。
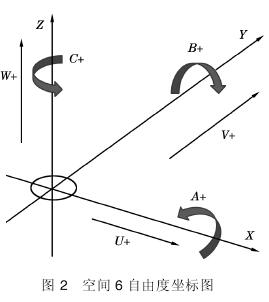
在空間 6 自由度坐標表示圖中,X,Y,Z 是 3 個平移的坐(zuò)標,A,B,C 是 3個繞著坐標軸旋(xuán)轉的坐標(biāo),在空(kōng)間 6自由度坐(zuò)標中(zhōng),任何的空間位置都可以用 X,Y,Z 的 3 個平移坐標和任意 2個角度坐標表示出來。
所以在五軸聯動的數控機床中(zhōng),刀位的移動都(dōu)是以5 個坐標軸作為基礎的,在 UCP 係列機床的五軸加工中,五軸就是指由 X,Y,Z 的3 個平移坐標和 A,C 的(de) 2 個角度坐標(biāo)。
2.2 五軸加(jiā)工中心軟件編程革(gé)新分析
數控係統(tǒng)可以把所有與機床有關的編程和操作(zuò)的(de)信息顯示出來,數控係統作為通用的控製係統,設計要滿足加工中心的要求,可以對刀具軌跡位置進行優化設計,數控係統的處理速度要達到高(gāo)速數據傳輸的(de)標準,編輯器要具有(yǒu)大型程序的編輯能力,在數控係統中把 NV 主控和驅動控製單元分離開,處理器采(cǎi)用英特爾品牌的。
在強大的硬件功能的支持下,采用數字(zì)化驅動計算,控製器全部實現數字控製。UCP 係列的五(wǔ)軸控製機床結構特殊(shū),在(zài)配備的 i TNC 數控(kòng)係統(tǒng)的時候(hòu)加入了 G,H 代碼和基本的輔助(zhù)功能,數控係統在程序運行的初始階段都有自己的初始化語句的設置,比如對工作(zuò)毛坯等進行設置。
比如(rú)一些常用的命令,刀具命令中進給速度 F,是刀具的中(zhōng)心移動(dòng)速度(dù),基本單位是 mm/min。進給速度的輸入可以在定位程(chéng)序(xù)塊中進行輸入,也可以在 TOOL CALL 程序塊中(zhōng)進(jìn)行輸入(rù)。主軸轉速用 S 表示,S是以每分鍾轉數在 TOOL CALL 刀具調用模塊程序中進行輸入的。
具的數據有(yǒu)刀具名稱和補(bǔ)償要求等,L 表示刀具的長度數值,刀具長度數(shù)值 L 的計算是刀具的長度和零號刀之間長度 L0的差值,也就(jiù)是刀具半徑的值。
程序的運行和加工功能可以(yǐ)通過(guò)輔助功能 M 進行實現,比如程序停止運(yùn)行用 M00 表示,任意選擇的程(chéng)序執行 STOP 操作用 M01 表(biǎo)示,清楚顯示的狀態用 M02,刀具更換和(hé)主軸停止運行我們用 M06 表(biǎo)示。M 的種類很多(duō),在五軸加工中(zhōng)心被廣泛(fàn)應用,在 i TNC 數控係(xì)統(tǒng)中的輔助(zhù)功能命令 M 有 M126 指令和M128 指令,M126 指令按照旋轉軸移動路徑最短為依據,對前置的刀具路徑進行優化處理的,M126 指令時數控係統自己的指令,在使用時要(yào)預先啟(qǐ)動。M128 指令是處理非線性誤差的,保證(zhèng)數控編程的精確性。
3 、五軸加工中心的編程革新研究
3.1 五軸加工中心前置處理分析
在現代工業中計算機仿真(zhēn)技術被廣泛應用,在實際的工程中,計算(suàn)機仿真係統(tǒng)的可靠性和穩定性非常重要。五軸加工靈活性強,五軸加工程序的編製要保證高質量是非(fēi)常重要(yào)的。五軸加工刀位軌(guǐ)跡的編程要保證代(dài)碼量少、編程精(jīng)確度高(gāo)。高質量刀位軌跡數據(jù)計算,對零件加工的過程起著(zhe)重要(yào)的作用,五軸加工中刀具軌跡生產的常用算法是(shì)等參數線法,切削行參數沿著 u 線和 v 線曲麵進行(háng)分布,生成刀切軌跡,計算方法簡單,滿足零部件的(de)切削性能(néng)。
在(zài)五軸數(shù)控(kòng)加(jiā)工中,刀具位置是不斷變化的,刀具位置軌跡的表示(shì)我們采用刀具軸線方向質量和刀具(jù)位置矢量來表示,切(qiē)削點位置矢量 r,刀具半徑 R2,加工(gōng)表麵在 P 點的單位矢(shǐ)量用 n 表示,可以計(jì)算(suàn)出刀位點(diǎn) P 的位置,見公式(1)和公式(2)。

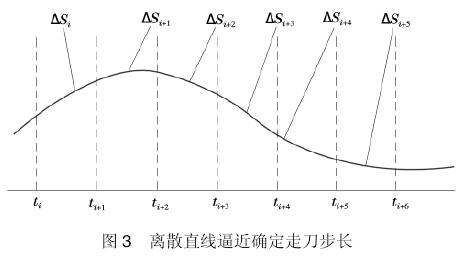
五軸數控加工中的走刀步長數值的確定,在(zài)一(yī)條刀位軌跡上 2 個相鄰的刀位點之間的距離就是走刀步(bù)長(zhǎng)。刀具軌跡的計算主要由走刀步長進行計算,其中等參數離散(sàn)逼(bī)近法是主(zhǔ)要的計(jì)算方法。在五軸數控加工(gōng)中,刀具的走(zǒu)刀步長(zhǎng)的計算是由(yóu)直線逼近誤差確定的,圖 3 所示離散直線逼近確定走刀步(bù)長,其中,ΔS 是(shì)直(zhí)線(xiàn)逼近的弧長,用直線長度代替。
3.2 五軸加工中心後(hòu)置處理分(fèn)析
刀具軌跡生成之後,可以對刀位數據進行轉換,計算出機床各個坐標軸的運動數據,然後就可以進行後置處理的計算(suàn)了。加工中心後置處理(lǐ)的、與機(jī)床相對應坐標軸中的(de)坐標數據,是通過刀位軌跡(jì)數據的 6 個坐(zuò)標數(shù)據轉換得出的。
應用機(jī)器人運動學知識,通過坐標變換,把刀位數據轉變成機床坐標對應的數(shù)據,通過機(jī)器人運動學建立直角坐標(biāo)係,直角坐標係的位置(zhì)可以通(tōng)過機(jī)器人各活動杆與機器人手臂之間的對應位(wèi)置表示出來,通過平移變換和旋轉變換來計算坐標。可以用1 個 3×1 的位置矩陣來計算機器人的活動杆和手臂與其(qí)他坐標軸之間的位(wèi)置關係,在 O 坐標軸(zhóu)和 H 坐標軸的坐標係中 3×1 矩陣見公式(3)。

在後(hòu)置處理(lǐ)中,刀具和工件之間(jiān)的運(yùn)動關係要根據機(jī)床結構進行確定,把前置處理的 6 個坐標軸的數據分配到機床的運動(dòng)軸(zhóu)上,轉換為各坐標軸的分量。後置處理的任務是把刀軌(guǐ)文(wén)件轉換成五軸加工中心的(de) NC 語言,後置處理流程見圖 4。
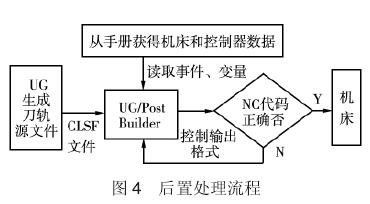
後置(zhì)處理 采 用 UG的後置(zhì)處理(lǐ)器(qì) 設 備 ,建立和機床控製係統匹(pǐ)配(pèi)的 2 個 文件,分別是定義文件和事件處理文件,從簡單到複雜的(de)控(kòng)製係統後置處理過程可以有UG 處理器來完成。後置處理的 2 個必要的要素,一個(gè)是刀軌,數據進(jìn)行輸入的時候可以輸入到後置處理界麵。一個是後置(zhì)處理器,作為(wéi)機床信息處理程序,對刀軌數據進行讀取,然後把讀取的數據轉換成機床可以識別的代碼。
後置處理的任務包括非線性誤差處理,進給速度(dù)處理,數控程序格式。在後置處(chù)理中,數控編程(chéng)後置處理可以實(shí)現進給速度控製,在機(jī)床係統中,通過後置處理對給進(jìn)速度路徑進行(háng)有效的(de)調整。
4 、總(zǒng)結
隨(suí)著數據編程技術的快速發展,五軸聯動數控機床在現代工業製造領域得到了廣泛應用,對五軸加工中心數控編程進行優化設(shè)計,實(shí)現對數控係(xì)統的(de)完美控製,對五軸加工中(zhōng)心的編(biān)程革新研(yán)究是一項具有實際意義的課題。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
金馬")
業界視點
| 更多
牌調查")
行業數據
| 更多
- 2024年11月 金屬切削機床(chuáng)產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車(chē))產量數據
- 2024年11月 新(xīn)能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月(yuè) 分(fèn)地區金屬切削(xuē)機床(chuáng)產量數據
- 2024年10月 金屬切削機床產量數(shù)據
- 2024年9月(yuè) 新能源(yuán)汽車(chē)銷量情況(kuàng)
- 2024年8月 新能源汽車產量數據
- 2028年8月 基(jī)本型乘用車(chē)(轎車)產量數據
博文(wén)選萃
| 更(gèng)多