


基於三維測量和混合建模的刀具三維磨損形態研(yán)究
2020-3-2 來源(yuán): 中國工程物理(lǐ)研究院培訓中 作者:廖海平,賀國(guó)燕,鄔婧,伍濤
摘要(yào): 刀具磨損部位的三維形態是研究刀具幾何參數合理性、分析刀(dāo)具磨損原因的重要依據。采用三維光學掃描(miáo)測量技術獲取磨損刀具的三維點雲數據,利用實體模型與點(diǎn)模型混合(hé)處理技術獲得刀具磨損區域的三維形態,基於 3D 模型和點雲(yún)數據的對比獲得磨損前後刀具變化色譜分析圖以及偏(piān)差分析報告。給出車削硬質(zhì)合金刀片的三維磨損形態分析步驟,驗證方法的可行性和有效性。
關鍵詞: 混合建模; 刀具; 磨損; 三維測量
金屬切削過程中,前刀麵、後刀麵不(bú)斷與(yǔ)切屑、工件接(jiē)觸(chù),接(jiē)觸區(qū)由於強烈的摩擦造成很高的溫度(dù)和壓力,最(zuì)終導致刀(dāo)具(jù)逐漸磨損失效。刀具磨損到一定程度時,工件(jiàn)的加工表麵質量和刀具的切削狀態將受(shòu)到很大影響,甚至不能保(bǎo)證正常有效的(de)切削。因此,刀具的磨(mó)損形態對分析工件的加工質量和切削狀態、研究刀具幾(jǐ)何參數合理性、分析刀具磨損原因等(děng)具有十分重要的意(yì)義。長期以來,研究人(rén)員采用各種直(zhí)接測量和間接測量的方法來獲取刀(dāo)具的磨損形態。
但這些方法大多無法獲(huò)得(dé)刀具的三維磨損形態,尤其是磨損量的三維形態。文中采用最(zuì)新三維(wéi)光(guāng)學掃描測量(liàng)技術和點雲與實體混(hún)合建模技術,對刀具磨損區域進行三維形態掃描檢測,通過三維重建,得到刀具(jù)磨損區域和磨損量的三維形態。
1 、刀具磨損檢測技術
1. 1 刀具磨損
刀具磨損主要取決於刀具材料及工件材料的物理機械性能和切削條件(jiàn)。刀具的主要磨損(sǔn)形態有前刀麵(miàn)磨損、後刀麵磨損、微崩刃、邊界磨損、片狀剝落、塑性變形等。實(shí)際中往往是以其中某一種磨損形態為主,多(duō)種磨損形態共有。新刀具(jù)從開始使(shǐ)用到(dào)磨損失效一般會經過 3 個階段,如圖 1 所示。
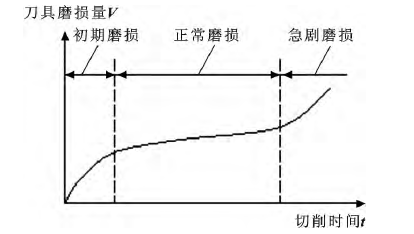
圖 1 刀具(jù)磨損(sǔn)的(de) 3 個階段
( 1) 初期磨損階段是因為新刀具切削刃較鋒利,且新刀具的前後刀麵往往(wǎng)存在著(zhe)微觀不平等缺陷,所以,這一階段的磨損很快(kuài)。但經仔細研磨過的刀具或現在的(de)成型刀片,其初期磨損量較小。
( 2) 正常磨(mó)損階段是在初期磨損後(hòu),刀具的粗糙表麵已經磨平,使刀具磨損速率明顯減小,則刀具進入正(zhèng)常磨損階段。這個階段的刀具(jù)磨損比(bǐ)較緩慢均勻,工件加工精度比較穩定,這是刀具工作(zuò)的有效階段。
( 3) 急劇(jù)磨損階段是刀具經過正常(cháng)磨(mó)損階段後切削刃變鈍,並進(jìn)一步導(dǎo)致切削力、切削溫度迅速升高(gāo),磨損速(sù)度急劇增加,不能(néng)滿足切削要(yào)求。為避免刀具使用到(dào)急劇磨損階段,常對刀具製定出相應的磨鈍標準。衡量(liàng)刀具磨鈍(dùn)標(biāo)準最主(zhǔ)要的一種方法就是利用正常磨損階(jiē)段的磨損量,因此,如何精確獲得刀具的磨損量是衡量刀具磨損的關鍵。
1. 2 刀具磨損檢測(cè)
針對不(bú)同的加工過程及刀具切削狀態,相應出現了許(xǔ)多不同的檢測方法,綜合起來主要分(fèn)為兩大類(lèi):直(zhí)接法和(hé)間接法。
( 1) 間接測量法間接(jiē)測量法是利用刀具磨損對不同(tóng)工作參數的影響效果,間接測量反映刀具磨(mó)損情況。優點(diǎn)是能在刀(dāo)具切削時實現在線檢測而不影響切削加工過程; 缺點是無法得到刀具磨損的定量分析,更無法獲得刀具磨損的三維形態(tài)。這(zhè)類方法在自動生產線得到較廣泛的應用。
( 2) 直接測量法
直接測量法與間接測量法正好相反,能夠識別刀刃(rèn)外觀、表麵質量或幾何形狀變化,但(dàn)一般都必須停機檢測。一般適合對刀具磨損進行(háng)檢測分析(xī)。典型(xíng)的刀具磨損檢測方法對(duì)比如表 1 所示。
表 1 典型刀具磨損檢測方法分類(lèi)
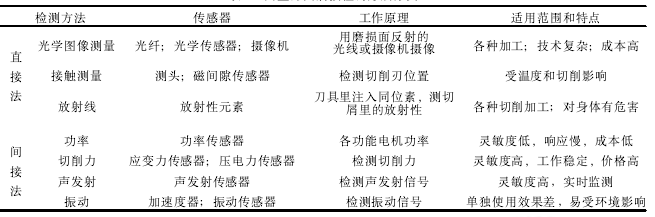
其中,基(jī)於光(guāng)學圖像處理的計算機視覺法和(hé)三維掃(sǎo)描測量法具有(yǒu)非接觸、容易獲得磨損精確(què)量、使用方(fāng)便且速度快的(de)優點,越來越受到科研人員的重視。三維掃(sǎo)描法還具有可立體成像、可進行三(sān)維比對等優點,為(wéi)刀具磨損的研究分析提供更直觀、更便捷的方法。
2 、三維(wéi)測量與混合建模原理模型
2. 1 三維數據檢測
逆向工程中三維數據測量常采用三坐標測量機( CMM) 和三維掃描儀,刀具的切削(xuē)刃形狀複雜,所需數據點龐(páng)大,很難采用三坐標測量機。這裏采用由兩台 CCD 攝像機和(hé)白光投射儀(yí)組成的空間三坐標測量(liàng)係統,三坐標掃描測量(liàng)係統的原(yuán)理和相應坐標係如圖 2 所示[8]。由 CCD 相機成像原理(lǐ)可知,可將相機看作理(lǐ)想的針孔(kǒng)透視變換模型。CCD 像機(jī) 1 的坐標係為 o1x1y1z1,像麵坐標係為 O1X1Y1Z1,有效(xiào)焦距為f1; CCD 像機 2 的坐標係為 o2x2y2z2,像麵坐標係為O2X2Y2Z2,有效焦距為(wéi) f2.
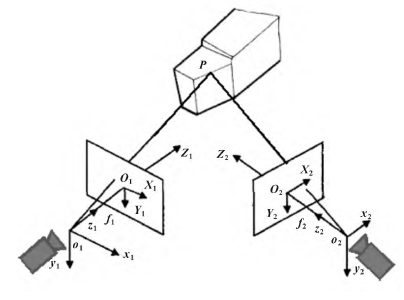
圖 2 雙目三維掃描成像模型(xíng)
設測 量 坐 標 係(xì) oxyz 與(yǔ) CCD 像 機 1 的 坐 標 係o1x1y1z1重合,則 o1x1y1z1與 o2x2y2z2坐標係的(de)空間位置關係為(wéi):
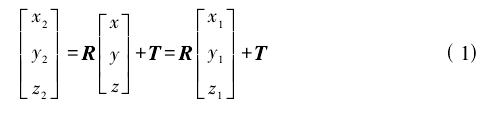
設點 P 是空間一點,它在左右兩個攝像相機中的像麵坐標分別為 X1、Y1和 X2、Y2,則可用下麵的(de)公式算出點 P 在測量坐標中的三維坐標值[9]:
由上式可知,如已知焦距 f1、f2、平(píng)移矢量 T 和(hé)旋轉矩陣 R,則可(kě)解算出被測刀具上點的(de)三維空間坐標,而所需的參數 f1、f2、T 和 R 都可(kě)以通過標定的方(fāng)法計算出來。這樣,當已知刀具上任(rèn)意(yì)一個點在左右兩個相機中(zhōng)的像素(sù)位置 ( 像麵坐標) 時,就可以計算出該點的(de)三維坐(zuò)標。
2. 2 實體模型與點模型混合數據處理(lǐ)
三維檢測得到(dào)的(de)數據是大規模的點雲數據,這些點雲(yún)隻是大規模的三維坐標點,如何將三(sān)維數(shù)據點雲與三維實體進行比較和相應布爾運算,從而得到刀具磨損的三(sān)維形態是(shì)數據處理的難點。傳統的基於麵的(de)布爾運算已經基本成(chéng)熟,而基於點模型的布爾運算算法還處於不斷研究摸索階段。
與傳統的 CSG 表示的實體模型不同,點模(mó)型不包含拓撲信息,無須進(jìn)行複雜的拓撲維護。因此,點(diǎn)模型的布爾運算主要有(yǒu)幾何重建、內外測(cè)試、求取交線和表麵重構等幾個步(bù)驟。通過分析可知,一個(gè)模型上的點元相對於另一個點模型實體有 3 種位置(zhì)關係:在另一個點模型實(shí)體內部、在另一個點模型實體(tǐ)外部或與(yǔ)另一個點模型實體相交。而基於點模型的布爾運算最主要的就是找到(dào)兩(liǎng)個點模型的相交元。這裏采用以 ADAMS 等[10]為代表的科研人員提出基(jī)於麵元 ( Surfels) 表示實體的點(diǎn)模型布爾運算方法。設 A 和 B 為基於麵元表示的點模(mó)型的麵元集合,Ain B表示模型 A 的表麵處於模型 B 內部的部分,Aout B表示模(mó)型(xíng) A 的表麵處於模型 B 外部的部分, ( Ain B)-1表示模型(xíng) A 的表麵處於模型 B 內的部分的補集。其(qí)他符號含義可(kě)類似推廣(guǎng)。則 A、B 點模型布爾運算後新的模型(xíng)點元集合表達式(shì)為:
為保證重采樣的麵元和保(bǎo)留(liú)的麵元能共同覆蓋新實體表麵,需對交線上的麵元沿另一模型的(de)表麵邊(biān)界(jiè)剖分,並對剖分後(hòu)的兩部分(fèn)麵元用(yòng)更小的麵元來表示,從而(ér)使(shǐ)新點模型表麵保持準確(què)而銳利的 特征邊界。
3 、混(hún)合建模下的刀具(jù)磨損形態測量
3. 1 刀具磨損形態測(cè)量流程
刀具磨損的三維形態(tài)檢測按照功能目標主要包括3 個模塊,即新刀具原(yuán)型獲取、磨損刀具點雲模型獲取、模型比對。而按照(zhào)技術特征則可分為三維數據采集、三維數據處理、模型對比 ( 磨損形態分析) 3 個(gè)流(liú)程。刀具磨損(sǔn)形態分析具體流程模塊如圖 3 所示。

圖 3 刀(dāo)具三維磨(mó)損形(xíng)態檢測流(liú)程
3. 2 刀具(jù)三維數據采集(jí)
如前麵三維檢測模型所述,利用三維掃描儀通過攝像機鏡(jìng)頭的坐標標定及三維坐標變換,測得刀具表麵點的三維坐標值,得(dé)到整個刀具表麵的點雲信息。由於光學掃描一般對環境溫度、亮度及被掃描物體的光反射特性(xìng)較為敏感,為得到準確(què)可靠的三(sān)維點元(yuán)信息應確保穩定的三維掃(sǎo)描環境 。因此,刀(dāo)具(jù)的三(sān)維數據采集(jí)一般應做好大量的準備工作: 首先,須確保三維掃描儀是建立在一個穩定(dìng)的環(huán)境中,不會受到外部因素的影響; 第二步,在三維掃描前(qián),應對(duì)掃描儀(yí)進行校準,保證三維掃描儀可以根據預先設置的掃描模式,計算出掃描設備相對於對掃描對象的位置; 第三步,對(duì)刀具(jù)表麵進行處理(lǐ),比如清除刀具表麵(miàn)的(de)油汙和雜質、對刀具表麵進行反光處理等。
所有準備工(gōng)作做好後可以開始進行刀具的掃(sǎo)描工作。用(yòng)三維掃描儀對刀具(jù)從不同的角度(dù)進行三維數據捕捉,更改刀(dāo)具擺(bǎi)放方(fāng)式(shì)或調整三維掃描儀相機方向,對刀具表麵進行全方位的掃描。有時候為了後期處理數據方便,可以設置一些標誌點或標誌球等。
3. 3 點(diǎn)雲數據處理
掃(sǎo)描得到的刀具三維數據不可避免地會引入數據誤差 ( 壞點) ,尤其(qí)是尖銳邊和邊界附近的測量(liàng)數據,壞點可能使該點及(jí)其周圍的曲(qǔ)麵片偏離原曲麵(miàn),所以(yǐ)要對(duì)原(yuán)始點雲數據進行預處理,通常有去掉噪(zào)聲點、數據插補、數據平滑、數據光順、點雲的重定位整合等。
點雲預處理完後,還需要對數據進行轉換(huàn),以得到(dào)所需的(de)數據格式。最簡單的是自(zì)動將點雲數據直(zhí)接轉換成 STL 文件,可直接與 3D 打印設備連接。但要(yào)想將(jiāng)模型導入 CAD 軟件(jiàn)進行混合建模(mó)編輯還需進行點雲數據的曲麵(miàn)重建。目前(qián)在點雲生成曲麵的過程中,主要有 3 種曲麵構造的方案: 其一是以 B-Spline或 NURBS 曲麵為基(jī)礎的曲麵(miàn)構造方案; 其二是以三角 Bezier 曲(qǔ)麵為基礎的曲麵構造方案; 其(qí)三是以多(duō)麵體方式來描述曲(qǔ)麵物體[11]。
實驗采用某型號可轉位車削刀片,刀片點雲(yún)數據處理主(zhǔ)要流程(chéng)如圖 4 所示。
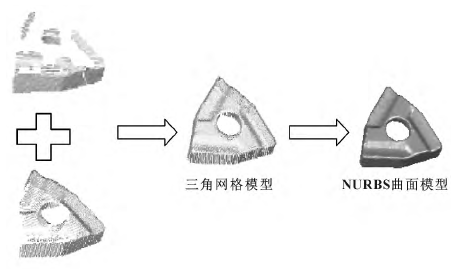
圖 4 車削刀片三維掃描點(diǎn)雲數據處理
3. 4 刀具磨損形態分析
由於在獲取新刀具實體模型和磨損刀具點(diǎn)模型時存在攝相機角度、距(jù)離和方(fāng)向等因素不(bú)同,在進行模型比對時首先需要對模(mó)型進行對齊,即模型坐標配(pèi)準。模(mó)型(xíng)對齊後,可對兩不同格式的模(mó)型進行布爾操作,以(yǐ)新刀具模型為基礎模型,與(yǔ)磨損後的刀具點雲模型進行(háng)布爾差,即可提取刀具磨損帶的三維點模型,進一步采用逆向建模的方法,可得到刀具磨損帶的三維實體模型。同樣以某型號可轉位車削刀片(piàn)為例,刀具磨損三維(wéi)形態檢測如圖(tú) 5 所示。
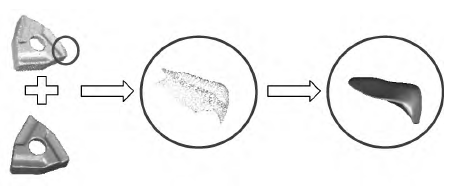
圖 5 車削刀片磨損形態三維建模
如無需刀具磨損(sǔn)帶的三維模型,也可直接將(jiāng)獲取的磨(mó)損刀具點雲(yún)模型與標準新刀具模型進行對比分析,即(jí)可獲取刀具磨損位置具體三維信息。圖 6 為某型號可轉位車刀(dāo)片采用三維分析軟件進行 3D 比對分析的情況,可以直觀地以色譜圖、偏差值報告作為根據對(duì)磨損位置的情況進行分析(xī)。
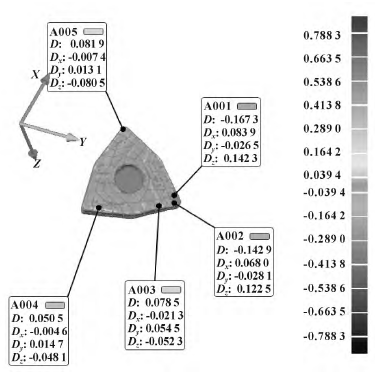
圖 6 車削刀片磨損前後三維比對分析
由於光學(xué)三維掃描(miáo)技(jì)術的檢測精(jīng)度(dù)為 0. 02 mm,因此,當(dāng)刀具(jù)磨損很輕微(wēi)的時(shí)候並不能被精確地檢測出,自然(rán)也無法獲得其磨損的微觀三維形態。
4 、結論
利用光學三維掃描技術可實現金屬切削刀具磨損部位的三維(wéi)數據檢測(cè),再利用點模型(xíng)的混合數據處理技術,可以實現切削刀具三維磨損形態的檢(jiǎn)測與建模,有利於(yú)分析刀具(jù)幾何參數合理性與刀具磨(mó)損原因,對於刀具和切削工藝優化等具有很強的(de)參考價值。受到檢測方法的限製,三維掃(sǎo)描技術的(de)重複(fù)精度在 0. 02 mm,當磨損量較小時要獲得刀(dāo)具的三維磨損(sǔn)形(xíng)態還比(bǐ)較困難。
投稿箱:
如果您有機床行業、企業相(xiàng)關(guān)新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相(xiàng)關(guān)新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信(xìn)息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區(qū)金屬切削(xuē)機床產量數據
- 2024年11月 軸承出(chū)口情況
- 2024年11月(yuè) 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能(néng)源汽車產量數(shù)據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月(yuè) 分(fèn)地區金屬切削機床產量數據
- 2024年10月 金屬切削機(jī)床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月(yuè) 新能源汽車產量數據
- 2028年8月 基(jī)本型乘用車(轎車)產量數據
博文選萃
| 更多
- 機(jī)械(xiè)加工過程圖示
- 判斷一台加工中心精度的(de)幾種辦法
- 中(zhōng)走絲線切割機床的發展趨勢(shì)
- 國產數控係統和數控機床何去何從?
- 中國的技術工人(rén)都去哪裏了?
- 機械老板做了十多年,為何還是小作坊?
- 機(jī)械行(háng)業最新自殺性營銷,害人害己!不倒閉才
- 製造(zào)業大逃亡
- 智能時代,少談點(diǎn)智造,多談點製造
- 現實麵前,國(guó)人沉默(mò)。製造業的騰飛,要從機床
- 一(yī)文搞懂數控車床加工(gōng)刀具補償功能
- 車床(chuáng)鑽孔攻螺紋加工(gōng)方法及工裝設計
- 傳統鑽削與(yǔ)螺旋銑孔(kǒng)加工工藝的區別(bié)