


基於PLC與GOT的CA6140臥(wò)式車(chē)床進給係統的改(gǎi)造計*
2016-9-2 來源: 廣東石油(yóu)化工學院機電工程(chéng)學院 作者: 喬東凱 趙晶(jīng)英 陳軍 廖(liào)輝
摘要(yào):闡述了CA6140臥式車床控製的原理與存在的問題,並細述了采用可編程控製器、觸摸屏、編碼器、步進驅動器和(hé)步進(jìn)電機(jī)對CA6140臥式(shì)車床的進給運(yùn)動自動控製的具體方法。從而實現(xiàn)了該車床智能化控製的目的。實踐(jiàn)證明該方法經濟實效。對(duì)其他類型的機床或電氣設備的(de)改造具有借(jiè)鑒和(hé)指導意義。
關鍵詞(cí):可(kě)編程(chéng)控製器;觸摸屏;車床;編碼器(qì);步進電機
0、引言
CA6140臥式車床進給的轉速控製是通過轉動手柄來控製.要改(gǎi)變刀架的(de)移動轉速,必須(xū)在刀(dāo)架停止的情況下(xià)進行.速度轉換時要轉動手柄。操作不便。有時需要頻繁地更換其主軸轉速,加快了齒輪之間的磨損(sǔn)。導致轉速(sù)達不到(dào)要求。此外(wài),齒輪(lún)在工作時,出現噪聲大,啟動、傳動不平穩,換速時(shí)衝擊力大等問題。進給(gěi)運動的進給量是通過手(shǒu)輪(lún)來控製的,會出現手輪(lún)轉動(dòng)後.存在(zài)一小段距離,刀架沒(méi)有移動。導致加工出現誤差。
1、調速改造方(fāng)案(àn)的(de)確定
未(wèi)改造前.進給運(yùn)動的轉速是由轉(zhuǎn)動手柄在(zài)不同擋位來控製,即改(gǎi)變齒輪之(zhī)間的齧合。其進給量則由手輪控製(zhì)。機床改造後,用步進電機代替溜板箱(xiāng)縱(zòng)向移動的大(dà)手輪和控製中滑(huá)板橫向運動的小(xiǎo)手輪,並通過(guò)編碼器實時反(fǎn)映距離,采用觸摸屏和PLC技(jì)術控製進給運動的進給量和進給速度(dù)。
(1)調速原(yuán)理
步進電(diàn)機的轉速
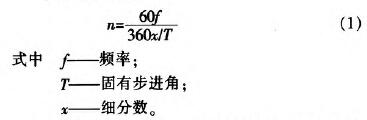
由式(1)可知,改變步進電機的頻率就可以調節進給速度,並且其頻(pín)率可在一定範圍內變化。所以轉速調節範圍寬。
步進電機的轉動圈數

由式(2)可知,改變步進電機的(de)脈衝(chōng)數可以改變步進電機(jī)轉動的圈數。進而改變移動的距離(lí)。
(2)PLC、步進電機、步進(jìn)驅動器、觸摸屏和編碼器的選擇
根據實際情況,係(xì)統需要(yào)控製2個步進電機,即PLC需要2個高速脈衝輸出(chū).為(wéi)方便操作和(hé)保(bǎo)證係統的可見性。係統(tǒng)配備有觸摸屏.故(gù)所(suǒ)需PLC的點(diǎn)數較少(shǎo),且要連接編碼器,需(xū)要晶體管輸出,最終選(xuǎn)擇型號為FX3U一32MT的三菱PLC。由(yóu)於(yú)代替手輪和手柄轉動的步進(jìn)電機不(bú)需要太大力矩.選擇步進電機57BYG250B—SAFRMC-0152.其保持轉矩(jǔ)為0.7 Nm,步距(jù)角是1.80,相數為2相。相應地選擇步進驅動器(qì)為SH一(yī)20402A。編碼器選擇(zé)型號為E682一CWZ5B.觸摸屏選擇性價比較高的型號為(wéi)M儒104X的威(wēi)綸觸摸屏。
(3)PLC輸入、輸出點(diǎn)的連接PLC輸入點、輸出點(diǎn)的連接如表l、表2所示。
表(biǎo)1 PLC輸入點(diǎn)的連(lián)接
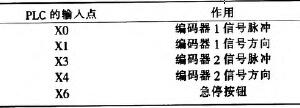
編碼器1(與(yǔ)大手輪連接)的脈衝與方向(xiàng)端分別(bié)與X0、X1連接:編碼器2(與小手輪連接)的脈衝與方(fāng)向端分(fèn)別與X3、X4連接:將一個急停按鈕與(yǔ)X6連(lián)接.用(yòng)來緊急停止整個(gè)係統。
表2 PIC輸出點的連(lián)接
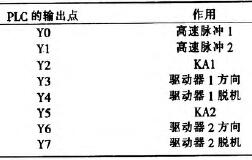
輸出點YO用於給控製床鞍和溜板(bǎn)箱縱向移動大手輪(lún)的步進電機驅動器1發送高速脈衝:輸出點Y1用於給控製中滑板橫(héng)向運動手柄的(de)步進電機驅動器(qì)2發送高速脈衝。連接到Y2、Y5的中間繼(jì)電器分別控製步進驅動器l和2的通電與斷(duàn)電。輸出點Y3、Y6分別給步進驅(qū)動器(qì)1和2發送方向信號,控製步進電機l和2正轉。輸出點Y4、Y7則是使步進驅動(dòng)器1和2脫機。
(4)PLC與步進(jìn)驅(qū)動器、步進電機的連接PLC與步(bù)進(jìn)驅動器、步進電(diàn)機的連接如圖1和圖2所示。
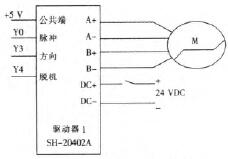
圖(tú)1 步進驅動器1的接法
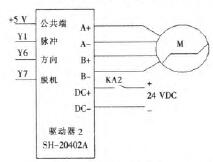
圖(tú)2步進驅動器2的接法
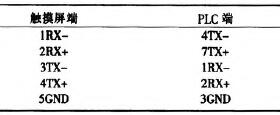
(5)PLC與觸摸(mō)屏的通訊PLC與觸摸屏的通訊如表3所示.PLC與觸摸屏接13類型(xíng)為RS-485 4W,通訊端口為COMl,通訊線:觸摸屏(公(gōng)頭)1、2、3、4,5對應PLC(公頭)4、7、1、2、3。
表3 PIG與艟摸屏(píng)的通(tōng)訊
(6)主軸(zhóu)速度和進(jìn)給運動的控(kòng)製
步進電機通(tōng)過(guò)步進(jìn)驅動(dòng)器來控製.即PLC通過步進驅動(dòng)器來控製步進電(diàn)機。具體方法是PLC給步進驅動器輸出一個高速脈(mò)衝、方向和脫機信(xìn)號。因為係統(tǒng)采用的(de)是64細分.所(suǒ)以要將步進驅動器的(de)刻度(dù)盤調到64細分。編碼器則連接到PLC的(de)輸入點,利用高(gāo)速計數(shù)器記錄下脈衝數.進而(ér)通過程序處理。反映出實時距離。
PLC開機初始化的程序如圖(tú)3所示。
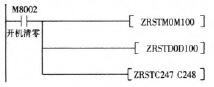
圖3 PLC開機(jī)初始化
當給PLC上電時,M8002接通一個掃描周期,係統對MO—M100,DO—D100,C247一C248進行清零。高速計數器計數並轉換為距離和清零操作(zuò)程序如圖4所示。
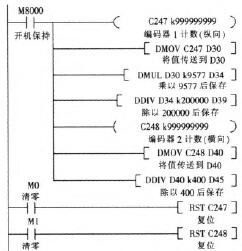
圖4高速(sù)計數(shù)囂計(jì)數並轉換為距離和清零操作
與縱向軸(zhóu)相連接的編碼器是通過(guò)式(1)進(jìn)行距離轉換.編碼器的軸與齒數為120及模數為0.25的齒輪相聯。因此,可以求出齒輪的直徑
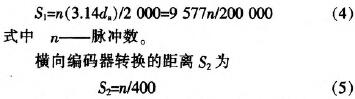
如圖4所示.當PLC開機後。編(biān)碼器轉換(huàn)程序一直在執行,反(fǎn)映出進給移動的實時距(jù)離。編碼(mǎ)器輸(shū)出的脈衝用高速(sù)計數器計數。縱向編碼(mǎ)器的脈衝由高速計數器C247計數.然後保存在寄存(cún)器D30中,之後乘以9 577。結果保存在D35中。最後除以200 000。結(jié)果保存在D39中。橫向編碼器的脈衝(chōng)由高速計數器C248計數(shù)。然後保存在D40中,再除以400。把運算結果保存在D45中。對高速計數器C247、C248的(de)清零.則是(shì)在手動對完縱向和橫向刀後進行,確(què)定零點位置。
主軸轉速(sù)和方向控製程序如圖5所示。
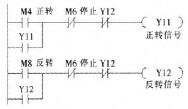
圖5主軸轉速(sù)和方向控製
當M4接通時,控製主軸正轉;當M8接通時,控製主軸反轉(zhuǎn):當M6接通時,停止主軸轉動。同時(shí)正轉和反轉設計(jì)了互鎖。即正、反轉之間的切換,必須要停止主軸(zhóu)。從而保護了主軸(zhóu)電動機。
縱向進給速度、進給量和方向控製如圖6所示。
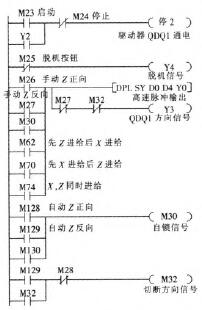
圖6縱向進給(gěi)速度、進(jìn)給量和方向控製
當線圈M23接通時。線圈Y2通電,給(gěi)步(bù)進驅動器l上電;當線圈(quān)M24接通時(shí),則步(bù)進(jìn)驅動器1斷電。當M25接通時,線(xiàn)圈Y4通電,給步進驅動器(qì)1發送脫(tuō)機信號。M26和M27是手動分別控製步進(jìn)電機的正反轉.即前(qián)進(jìn)或後退。當M28接通時,自動控(kòng)製步進電機正轉:當M29接通時,自動控製步進電機反轉。當M27或M29接通時,切斷步進驅動器方向信號Y3,進而控製步進電機反轉。當M28或M29接通時(shí).M30自鎖.給(gěi)步進驅動器輸出(chū)脈(mò)衝。其中DO和D4的值可以根(gēn)據(jù)需要進行改變.分別改變進給縱向的進給速度和進給量(liàng)。
橫向進給速度、進給量和方向控製的程序如圖7所示。

圖7橫向進給速度、進給量和方向控製
當線圈M34接通時,給步進(jìn)驅動器上電:當線圈(quān)M36接(jiē)通時,則斷電。當M38接通時.給步進驅動器2發(fā)送脫機信號Y7。M40和M42是手動(dòng)分別控(kòng)製步進電機的正反轉,即前進或後退。當M43接通時,自動控製(zhì)步進電機(jī)正轉;當M44接通時,自動控(kòng)製步(bù)進電機反轉。當(dāng)M42和M44接通時.切斷步進驅動器方向信號Y6.進而控製步進電機反轉。當M43和M44接通時,M46自鎖.給步(bù)進驅動器輸出脈衝。其中D8和D12的值可(kě)以根據需要進行改變.分別改變進給橫向運(yùn)動的轉動速度(dù)和進給量(liàng)。
進(jìn)給(gěi)運動(dòng)的速度和進給量轉換如圖8所示。
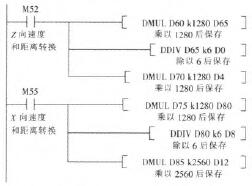
圖8進給運(yùn)動的速(sù)度(dù)和進給量轉換
當M52接通時,將速(sù)度值D60根據式(1)轉換為頻(pín)率保(bǎo)存在D0中;將(jiāng)進給量D70根據式(2)轉換為轉動的圈數後.再轉變為脈衝數保存在D4。當M54接通時,將速度值D75根據式(shì)(1)轉換為頻率保存在D8中;將(jiāng)進給量D85根據式(2)轉換為轉動的圈數(shù)後.再轉變為脈衝數保存在D12。
進給(gěi)運動的橫向與縱向運動的控製(zhì)如圖9所示。

圖9進給運動的橫向與縱向運動控製
當M60接通時。M62自鎖。開始橫(héng)向運動;當所走距(jù)離(lí)值D35與(yǔ)所設距離值D90相等時.M64接通,開始縱向運動:當所(suǒ)走距(jù)離值D45與所設距離值D95相等時,複位M62,即停止運動。當M66接通時(shí),M68自鎖,開始縱向運動;當所走距離值D45與所設距離值D95相等時(shí).M70接通.開始橫向(xiàng)運動。當所走(zǒu)距離值D35與(yǔ)所設距離值(zhí)D90相等(děng)時.複位M68,即停止(zhǐ)運動。當M72接通時,M74自(zì)鎖(suǒ),橫向和縱向運(yùn)動同時進行.當所走距離值與所設距離值相(xiàng)等時,複位M74。即停止運動。
2、結語
本設計從電氣控製(zhì)方案、元器件選型及機加工係統(tǒng)現(xiàn)場環境(jìng)等(děng)因素綜合考慮.對CA6140車床的進給運動進(jìn)行了電氣化改造(zào).改造後的該設備(bèi)控製電路簡單,穩定(dìng)性和可靠性也增強。操作方便,實現了進給係統的自動化控(kòng)製。進而提高了加(jiā)工精度。
參(cān)考文獻:
[1]蔡厚道.渦旋式壓縮機(jī)動渦盤銑削(xuē)加工宏程序的(de)開發[J].煤礦(kuàng)機械,2015,36(7):282—284.
[2]王繼群.基於改進的遺傳算(suàn)法及其在機床(chuáng)主軸箱加工路線優化應用[J].煤礦(kuàng)機械,2014,35(1 1):246-248.
[3]趙國勇,鄭(zhèng)光明,劉晨(chén)希.基於四次多項式的(de)數控加工運動處理算法研究[J].組合機床與自動化加工技術。2014(2):13—15.
[4]喬東凱,黃崇林.PLC在C650臥式車床電氣控(kòng)製線路改造中應用[J].裝備製造技術(shù),2008(1):62—63.
[5]劉濤,陳明.基於人機工程學的(de)數(shù)控(kòng)機床設計與分(fèn)析[J].組合機床(chuáng)與自動化加工技術.2014(1 1):49—52.
[6]張彥民.CA6140型普通車床的(de)數控化改(gǎi)造研究(jiū)[J].煤礦機械,2013,34(5):213—215.
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊(xùn)合作,歡迎聯(lián)係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊(xùn)合作,歡迎聯(lián)係本網編輯部, 郵箱:skjcsc@vip.sina.com
更(gèng)多相(xiàng)關信息

業界視點(diǎn)
| 更(gèng)多

行業數據
| 更多(duō)
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金(jīn)屬(shǔ)切削機床產量數據
- 2024年11月 軸(zhóu)承出口情(qíng)況
- 2024年(nián)11月 基本(běn)型乘用車(轎車(chē))產量數據
- 2024年11月 新能源汽車產量數據(jù)
- 2024年11月 新能源汽車銷量情(qíng)況
- 2024年10月 新能源汽車(chē)產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分(fèn)地區金(jīn)屬切削機床產量數據
- 2024年10月(yuè) 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年(nián)8月 新能源汽車產量數據
- 2028年8月(yuè) 基本(běn)型乘(chéng)用車(轎車)產量數據
博文選萃
| 更多(duō)