
一、傳動精度的概念
傳動鏈的傳動精度主要包括傳動誤差和空程誤差兩部分(fèn)。
1 傳動誤差
傳動誤差是指輸人軸單向回(huí)轉時(shí), 輸出軸轉角的實際值相對於理論值的變動量(liàng)。
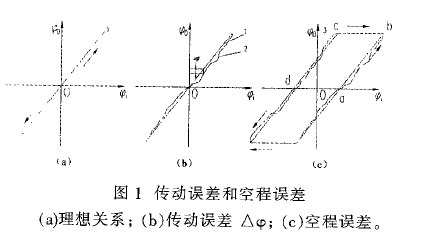
由於(yú)傳動誤差的存在, 使輸出軸(zhóu)的運(yùn)動時而超前, 時而(ér)滯後(hòu)。若(ruò)傳動裝置各組成零部(bù)件齒輪、軸、軸承、箱體製(zhì)造和裝(zhuāng)配絕對準確, 同時又忽略(luè)使用過程中的溫度變形和彈性變形, 那麽, 在(zài)傳動過程中, 輸出軸轉角Φ1 與輸人軸轉角電應符合如下理想關係(xì):

這時, 輸人軸若均勻回轉, 輸出軸亦均勻回(huí)轉;輸人軸若反向回轉, 輸出(chū)軸亦無滯後地立即反向(xiàng)回轉。當i=1 時Φ0與Φ1之間的(de)關係曲線(xiàn)如圖1(a) 中的直線(xiàn)1。實際上, 各(gè)組成零部件(jiàn)不可能製造和裝配得絕對準確, 而在使用過(guò)程中還會存在溫度變形和彈性變形。因此, 在傳動過程中輸出軸的轉角總會存在誤差。圖1(b) 中的曲線(xiàn)2 表示單向回轉時, 由於存(cún)在(zài)傳動誤(wù)差(chà)△Φ 甲, 輸出軸的Φ0與(yǔ)輸人軸的電(diàn)之(zhī)間的關係。
2空程誤差
空程誤差是與傳動誤差既有聯係(xì)又有(yǒu)區別的另一類(lèi)誤差。空程誤差可以定義為輸人軸由正向回轉變為反向回轉(zhuǎn)時, 輸出軸(zhóu)在轉角上的滯後量。也可以(yǐ)把它理解成輸人(rén)軸固定時, 輸出軸可以任意轉動的轉(zhuǎn)角量。空程誤差使輸出軸不能立即隨著輸人軸反向回轉。即反向回轉時, 輸出軸產生滯後運動。輸人軸轉角與輸出軸轉角的關係曲線與(yǔ)磁滯回線相似, 如圖1(b)中的曲線3 所示。
當主動輪從電Φ=0 開始正轉(zhuǎn)時, Φ0無輸出; 過a點後, 兩輪齧合, 從動輪按速比正向轉動b從b 點開始Φ反向時, 吼無輸出, 主動輪轉過齒間(jiān)(從b到c ); 從c 點開始兩輪在齒的另一側接觸(chù), 從動輪才開始按速比反向(xiàng)轉動; Φ1 回到0 時, Φ不是0 , 主動輪繼續反轉到d ,吼達(dá)到零。這就是常說的齒隙滯遲回回線。
需要注意;定義傳動誤差和空程誤差時, 均是對轉角而言的, 因此其單位均為角(jiǎo)度單位角分(fèn)(‘)或(huò)角秒(“)。當(dāng)在齒輪節圓上來討論時, 傳動(dòng)誤差和空程誤差具有線值的形式, 單位常為(wéi)微米(μm)。對一個齒輪來講,轉角誤差的(de)角值△Φ及其在節圓上(shàng)的(de)線值△ 之間有下列關係;
(2) 空程(chéng)誤差並不一定隻在反向時才有意義, 即使是單向回轉, 空程誤差對傳動精度亦可能有影響。例如在單向回轉中(zhōng), 當輸出軸上受到一個與其(qí)回轉方向一致的足夠大的外力矩作用(yòng)時, 由(yóu)於空程誤差(chà)的存在, 其轉角可能產生一個(gè)超前量;又如在單向回轉過程中, 當輸人軸突然減速時, 若輸(shū)出軸上的慣性力矩足夠大, 由於空程(chéng)誤差的存在, 輸出軸(zhóu)的轉角亦有可能產生一個超前量。
傳動鏈的傳動誤差和空程誤差對(duì)機電控製係統性能(néng)的影響, 隨其在係統中所處的位置(zhì)不同而不同。
二、提高傳動精度(dù)的結構措施
提高傳動精度的(de)結構措施有;
(1)適當提高(gāo)零部件本身的精度;
(2) 合理(lǐ)設計傳動鏈, 減少(shǎo)零部件製造、裝(zhuāng)配誤差對傳動精(jīng)度(dù)的(de)影響;
(3) 采(cǎi)用消隙(xì)機構, 以減少或消除空程。
1適當提(tí)高零部件本身的精度
這(zhè)是指提高各(gè)傳動零部件本身(shēn)的製造、裝配精度。例如, 為了減小傳動誤差, 一般可采用6 級精(jīng)度的齒輪, 甚至采用5級或4級精度。為了減小空(kōng)程, 一般可選用較小的側隙或零側隙, 甚至“負側隙” 。負側隙是在加工齒輪時, 使實際齒厚比理論齒(chǐ)厚有稍許增加。這樣, 傳動時在輪齒發生幹涉的部位, 借助微量的彈性變形來補償。采用負側隙後, 傳動效率將顯著下(xià)降。選用較小的中心距偏差, 亦可減小空程。
對減速傳動鏈來說, 提高末級的精度, 效果最為顯著。例如, 有的動(dòng)力傳動裝(zhuāng)置, 前幾級均采用7級精度(dù)的齒輪, 而末級選用了6 級精度的齒輪。
此外(wài), 傳動裝置的輸出軸與負載軸之間的聯軸器本身的精度, 對傳動精度的影響也很(hěn)顯著, 要予以足(zú)夠的重視。
2 合理設計傳動鏈
這裏介紹三種方法:
(1)合理(lǐ)選擇傳動型式(shì)
在傳動鏈(liàn)的設計(jì)中, 各種不同型式的傳動, 達到的精度是不同的。一般說來, 圓(yuán)柱直齒輪與(yǔ)斜齒(chǐ)輪機構(gòu)的精度較高, 蝸杆(gǎn)、蝸輪機構次之, 圓錐齒(chǐ)輪(lún)則更次之。在行星(xīng)齒輪機構中(zhōng), 諧波齒輪精度最高(gāo), 漸開線行星齒輪機構、少齒差行星齒輪機構次之, 擺線針齒輪行星齒輪機構更次之(zhī)。
(2)合理確定級數和(hé)分配各級傳(chuán)動比減少傳動級數, 就可減少零件數量, 也就減少了產生誤差的環節。對(duì)減速傳動鏈, 各(gè)級傳動比宜從高速(sù)級開始, 逐級遞增(zēng), 且在結構空(kōng)間允許的前提下,盡量提高末級(jí)傳動比(bǐ)。一般來說, 減(jiǎn)速傳動采用大的傳(chuán)動比, 可使從動輪半徑增大, 從而提高了角值精度。
(3) 合理布置傳動鏈
在減速傳動(dòng)中, 精度較低的傳動機構(如圓錐齒輪機構、蝸杆蝸(wō)輪機構)應布置(zhì)在高速軸(zhóu)上, 這樣可(kě)減小(xiǎo)低速(sù)軸上的誤差。
如圖2 所示, 精度較低的圓錐齒輪副(fù)對精(jīng)自整角機軸的傳動精度的影響, 圖(a) 要比圖(b)小。
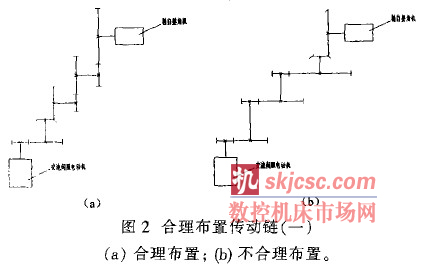
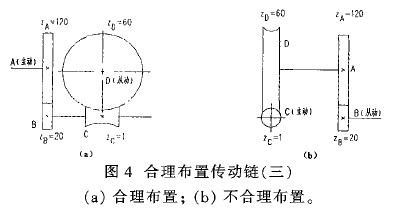
圖4 是兩個傳動鏈方案的比較。在(a) 方案中,A 為主(zhǔ)動, D為從動; 在(b) 方(fāng)案中(zhōng), C 為主動,B 為從動。
設齒輪副在小齒輪軸上的角值誤(wù)差為(wéi)△ AB, 蝸輪副在蝸輪軸上的角(jiǎo)值(zhí)誤(wù)差為△CD 。, 並令△AB= △CD= △ ,則(a)方案中, 從動軸D 的(de)總誤差為(wéi):
顯然, (a)方(fāng)案要比(b) 方案好。一般來說, 當要求減小由於(yú)傳動零件的製造、裝配誤差所引起從動軸的角值誤差時, 應在從動(dòng)軸之(zhī)前選用減速鏈, 因為這樣可以使各項誤差對從動(dòng)輪的影響, 經過減速的作用而減小。
3 采用消隙機構
消隙機構的型式很(hěn)多, 下麵結合實際舉出幾個(gè)例子。
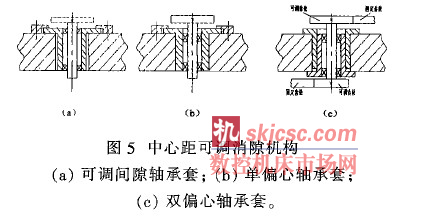
(1) 中心(xīn)距可調消隙
這(zhè)是一種常用的消隙方法, 它是在裝配時(shí)根據齧合情況調整中(zhōng)心距, 以達到減(jiǎn)小齒隙的目的。中心距可調消隙機構如(rú)圖5 所示。其中圖(a) 中有一個留有調整間隙(一般為0.01~0.03mm) 的(de)軸承套, 它(tā)與齒輪基本同心; 圖(b) 使(shǐ)用了一個偏心軸承套; 圖(tú)(c) 使用了雙(shuāng)偏心軸承套。在一個(gè)輪係中, 可調(diào)齒輪常與固定齒(chǐ)輪交替排列(liè)。一般將調整部分設計成(chéng)整個可動的, 或者(zhě)齒輪(lún)裝在外伸懸臂軸上, 調(diào)整時就便於保持軸的平行度。
對於(yú)減速輪係, 最(zuì)後一級齒輪副對空程的影響最大,因此(cǐ)將最後一級齒輪副設計成中心距可調, 最為(wéi)有(yǒu)利。這種消隙機構即可用於數據傳動, 亦可用於動力傳動。
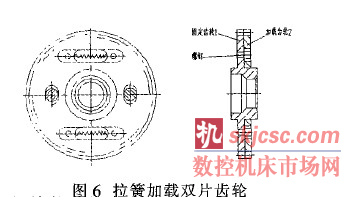
(2)彈簧加載雙片齒輪消隙這是一種常用的消隙方(fāng)法(fǎ)。圖6所示為一種拉簧加載雙片(piàn)齒(chǐ)輪。圖中1為與軸固定的固定齒輪片,2為空套在(zài)軸上的浮動齒輪(lún)片, 又(yòu)稱加載齒輪。兩片齒輪用拉簧拉緊。裝配(pèi)時, 使兩片齒輪叉開1~3個齒, 保(bǎo)證彈簧有(yǒu)一個預緊力。螺釘是在安裝(zhuāng)調(diào)整時用作(zuò)固緊.
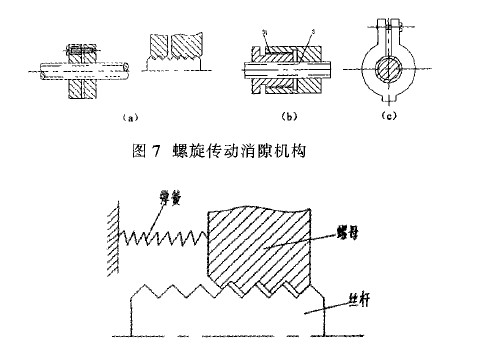
(3) 螺旋傳動的消隙
圖7(a) 所示為一種軸向(xiàng)消隙機構, 螺母分兩(liǎng)部分, 擰動小螺母, 可使左邊部分螺母變形(xíng), 從而調整軸(zhóu)向間隙(xì)。圖7(b)為另一種軸向消隙(xì)機構, 圖中螺距S1不等於S , 但是S1≈S。圖7(c) 為徑向消隙機構。圖(tú)8所示為彈簧加載消隙原理(lǐ)圖, 由於螺母在彈簧作用下,始終與絲(sī)杆螺紋單麵(miàn)接觸(chù), 從而(ér)達到消隙目的。
消隙方(fāng)法很多, 在此僅就常用(yòng)的方法加以例舉。此外, 傳動鏈的消隙方法也(yě)有很多種類。例如輔助輪係消隙; 輔(fǔ)助力矩電動機加載消隙; 雙傳動鏈預緊齒輪消隙; 雙傳(chuán)動鏈摩擦阻尼消隙;雙傳動鏈彈簧加載消隙; 雙傳動(dòng)鏈電消(xiāo)隙等。
三、結束(shù)語
本文(wén)從傳動鏈的傳動精度出發, 闡述了傳動誤差和空程誤差的(de)概念, 進而提出了提高傳動鏈的傳動精(jīng)度的(de)結構措施。
如果您有機床行業、企(qǐ)業相關新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com








