
近些年隨著我國(guó)工業(yè)技術的迅猛發展(zhǎn), 對裝備製造業提出了(le)更(gèng)高的要求, 具體包括製造精(jīng)度、可靠性、強度、剛度等性能, 其中精度和可靠性尤為(wéi)重要(yào), 其代表(biǎo)了一個國家(jiā)的製造業水平。精密傳動鏈憑借其(qí)獨特的優點, 在(zài)要求高精度和高動態性能的設備中得到了越來越廣泛的應用, 其對製造業水平的提高, 製造精度和可靠性起到了保障作用。因此高精度(dù)優良動態性能(néng)的傳動裝置的研製(zhì)開發非常重要(yào), 與此同時, 精密傳動鏈的傳動誤差檢測分析也成(chéng)為亟(jí)待解決的問題之一。傳動係統傳動誤差的測量有多種檢測手段和方法, 按照其測量的方式來看通常主要有動態測量和靜態測量兩種方法, 下麵將對其分別進行介紹和分析說明。
1 靜態測(cè)量
靜態測量是指將傳動鏈的輸入端轉過(guò)一定角度後停下來, 在靜(jìng)止的狀態下測量輸入端和輸出端各(gè)自(zì)的(de)轉角, 兩者進行比較從而得到傳動誤差的方法。通常選(xuǎn)用的儀器有光學度盤、經緯儀、多麵體、數字測角儀、分度頭、自整角機(jī)以及旋(xuán)轉變壓器等[1]。其中, 多麵體、經緯儀、光(guāng)學度盤(pán)屬於光學式測(cè)量, 使用還需(xū)分別輔助(zhù)於自準直光管和讀數顯微(wēi)鏡等設備。
靜態測量方法的應(yīng)用如圖1 所示, 圖(tú)1 的測試原理為多麵(miàn)體法(fǎ), 它利用光學多麵棱(léng)體並輔助於光柵、自準平(píng)行光管等設備進行測量。
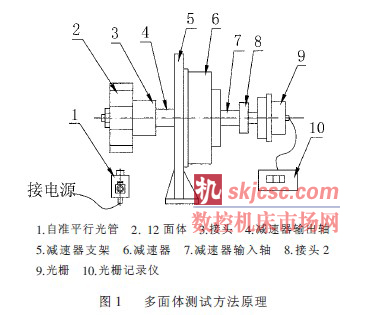
測(cè)量時光柵(shān)安裝在傳動裝置輸入端上, 輸出端安裝高精度角度計(jì)量元件———12 麵體, 利用自準平行(háng)光管對12麵體進行觀測並定位。光柵記錄儀(yí)所顯示的值, 是(shì)輸入軸的實際(jì)轉角值, 其與理論轉角的偏差即為輸入(rù)軸在該(gāi)點的傳動誤(wù)差。在輸出軸旋轉(zhuǎn)一周範圍內測量時, 取(qǔ)其中(zhōng)最大值與最小(xiǎo)值的差值, 便可得到以輸出軸一周為周期的減速器的輸入軸的(de)角度傳動誤差[2]。
靜態測量的測量過程是不連續的, 不像動態測量那樣能比較全麵地將(jiāng)傳動誤差揭示出(chū)來。這(zhè)種測量回轉(zhuǎn)誤差的方(fāng)法(fǎ)由於其設備簡單、理論比較成熟、造價較低, 容易實施, 在早期得到廣泛的應用。
2 動態測量
隨著精密(mì)傳動裝(zhuāng)置的廣泛應用, 靜態測量法逐漸暴露了它(tā)的缺點和局限性。精(jīng)密傳動裝(zhuāng)置的傳動誤差具(jù)有高頻性質, 而靜態測量法測量的(de)是(shì)傳動過程中若幹個間(jiān)斷點(diǎn)的傳動誤差, 它反映的誤(wù)差不全麵, 並且測得的誤差有可能並不是傳動鏈最(zuì)大誤差, 更無法進行頻譜分析(xī), 不便於分析和查找主要誤差來源, 不利於(yú)進一步確定提高精度的途徑。因此, 隨著高性能處(chù)理器(qì)和高精度傳感器的普及, 動態測試己逐漸成為現代測試技(jì)術(shù)的標誌和主流[3]。
動態測量是指在接近工作時的(de)運行狀態下測量輸入端和輸出端的轉角, 兩者進行比較而得到傳動誤差的方法,其測(cè)量過程是連續的, 或者說(shuō)是接近於連續的, 因此它能將傳動誤(wù)差全麵地揭(jiē)示出來。測量的方法(fǎ)有磁分度法、慣性法、光柵法和時柵(shān)法等。
2.1 磁分度法
這種(zhǒng)方法可分為絕對比相式、兩路分頻式單路倍頻分頻式、錄放差頻式和差額激磁式等多種。現以絕對比相式為例來介紹磁分度法的測量原理(lǐ)及其過程, 磁分度(dù)法絕對比相式測試原理如圖2 所示(shì)。
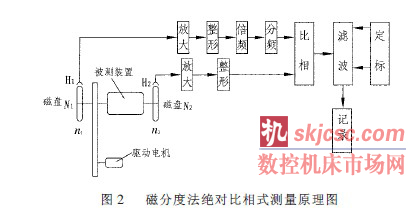
它采用兩(liǎng)個在圓周上錄有正弦磁波的(de)標準錄磁的磁盤來測量(liàng)傳動裝置的傳動誤差, 測量時, 將磁盤1 安裝在輸入軸上, 將磁(cí)盤2 安(ān)裝在(zài)輸出軸上。磁(cí)盤1 的磁波數為(wéi)N1, 磁盤2 的磁(cí)波數為N2 (N1、N2 需為整數)。兩磁盤的磁波數之比應等(děng)於(yú)傳動鏈的傳動比i, 即i=N1 /N2。在磁盤1 和磁盤2 的圓周上分別設置兩(liǎng)個固(gù)定(dìng)磁頭H1 和H2 用來感應磁盤上的正弦信號。當傳動鏈工(gōng)作時, 輸入軸(zhóu)和(hé)輸出軸分別以轉速n1、n2 旋轉, 這(zhè)樣, 磁頭H1 便感應出頻率為n1N1 的正弦信號; 磁頭H2 則感應出頻率為n2N2 的正弦信號。由於i=N1 /N2, 所以n1N1=n2N2。即兩磁頭(tóu)感應出的(de)信號頻率相同(tóng)。然後, 將兩路信號經過放大、整形, 便可進入相位計中比相。當傳動裝置的傳動誤差為零時(shí), 則兩路信號將保持恒定的相位(wèi)差; 當傳動裝置的傳動誤差不為零(líng)時, 則其相位差將隨之改變。相(xiàng)位差的變化量即代表傳動裝置(zhì)的傳(chuán)動誤差。在實際測(cè)量中, 相位差在相位計中需進行濾波, 濾掉不需要的高次(cì)諧波, 將以電壓形式輸出,通過記錄儀, 畫出傳動曲線, 然後通過定標, 得到傳動鏈的傳動誤差(chà)。
該種測試方法能夠直接從高精度的磁盤上拾取信號進行比相(xiàng), 所以測量(liàng)的精度比較高。但(dàn)其缺點是需要高精度的錄磁(cí)設備; 磁盤易磨損失磁, 壽命較短; 感應信號弱,不(bú)宜用作低速測量; 而且, 這種測量法從信號進來(lái)到化成同頻率的過程中經過了多次的處理, 這種即使係統(tǒng)複雜又容易引入誤差, 而且(qiě)在遇到非整數(小數、無理數) 傳動比的時(shí)候, 很難實現比相過程[4]。
2.2 慣性法
慣性法是一種高精度的動態測量方法, 它利(lì)用物體的慣性原理, 產生理想的勻速旋轉運動, 與被測的(de)不均勻旋轉運動相比較而得到角位移偏差的一種測量方法(fǎ)。所以,用該方(fāng)法製(zhì)成的儀器被稱為慣性式(shì)回轉不均勻性檢查儀,又因為這種儀器和地震儀相似, 因此, 這種方法也被稱作地震儀法。其測試原理如圖(tú)3 所示。
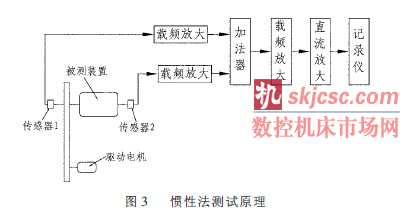
兩傳感器具有相同固有頻(pín)率和(hé)阻尼度, 分別安(ān)裝在傳動(dòng)裝置的輸入軸和輸出軸(zhóu)上並以角位移偏差作為輸(shū)出信號來測量兩軸回轉運動之間的相(xiàng)對不均勻性。測量(liàng)時傳感器(qì)1 將輸入軸角位偏差Δψ1 衰減i 倍(bèi)後以電信號輸出(chū), 傳感器2 則將輸出軸角位移(yí)偏(piān)差Δψ2 以電信號輸出, 兩輸出信號便一起進入加法(fǎ)器中(zhōng)相(xiàng)減, 消(xiāo)除絕對回轉不均勻性誤差, 而得兩軸間相對回轉不(bú)均勻(yún)性誤差, 即是傳動誤差引起的輸出(chū)軸角位移(yí)偏差, 設傳動誤差引起(qǐ)的輸出軸角(jiǎo)位移偏差為Δψc, 則Δψc=Δψ2-Δψ1 / i。再經載頻(pín)放大(dà)和功率放大後, 便可由記錄儀畫出傳動誤差曲線, 然後通過定標就可以得到傳動裝置的傳(chuán)動誤差。
慣性法的測量精度高(gāo), 測量頻域範圍寬(kuān), 而且設備相對比較簡單, 測量(liàng)比較(jiào)方便, 不需要高精度的測量元件。相對磁分度法而言, 慣性法可以測量任意數值的傳動比,包括非整數的傳動比。但是, 慣性法對於低頻的運動(dòng)誤差, 因受其固有頻率限製是不能測量的。此外, 當這(zhè)種儀器在(zài)水平方向(xiàng)旋轉時, 由(yóu)於十字彈(dàn)簧剛度的影響, 會產生一個(gè)呈正(zhèng)弦變化(huà)的固有誤差, 影響其測量精度, 最大測量誤差甚至(zhì)可以達到垂直使(shǐ)用時的100 倍。
2.3 光柵法
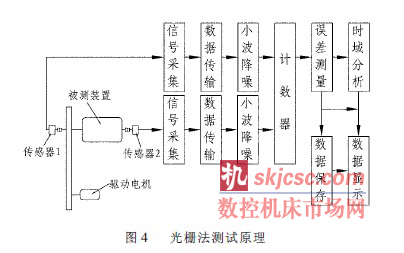
光柵法是利用光柵度盤產生莫(mò)爾條紋, 通過光電轉換,將旋轉的角位移轉變成電信號輸出, 從而測量傳動誤差(chà)的(de)一種動態測量方(fāng)法。目前, 光柵法是最為(wéi)流行的動(dòng)態精度測試方法, 光柵法測試原理如(rú)圖4 所示。
測試時將光柵式角位(wèi)移傳感器分別(bié)通過精密聯軸(zhóu)器與(yǔ)被測傳(chuán)動裝置的輸入軸和輸出軸上。傳動裝置被驅動後(hòu),輸入端(duān)和(hé)輸出軸的角位移(yí)信息分別由兩(liǎng)路光柵傳感(gǎn)器采集, 並產生(shēng)反映輸入端和輸出軸角位移信息的脈衝(chōng)信號。然後將這(zhè)兩路脈衝信號傳輸到計算機, 經過小波降噪, 過濾掉信號中的幹擾成分, 再送入計數器進行脈衝計數。誤差測量軟件模塊不斷讀取(qǔ)計數器的數據, 依次計算出(chū)傳動誤差。同時傳動(dòng)誤差數值不斷地被保存到計算機硬盤的指定空間, 並同時在顯示器上顯(xiǎn)示出(chū)來。誤差測量得到的離散數(shù)據經過時域(yù)分析, 最後也由顯示器顯示出來。
使用光柵法測量(liàng)時不用每次(cì)定標; 測量值不受傳動比變化的影響; 儀器的測量精度高; 可測量傳(chuán)動比範圍(wéi)廣;可以垂直使用, 也(yě)可水平使用; 但一般比較昂貴[5]。它適用於精密齒輪傳動、精密分(fèn)度頭、雷達、跟(gēn)蹤望遠鏡等精密傳動鏈誤(wù)差的測量, 是目前最為流行的一種傳動(dòng)誤差動態測試方法。
2.4 時柵法
目前, 光柵法是(shì)應用廣泛的傳動誤差的動態測試方(fāng)法, 精度高, 技(jì)術成熟, 但不可避免仍(réng)有許多缺點, 其根本(běn)原(yuán)因在於光柵傳感器柵線數難以進一步刻劃, 隻能依靠電子細分, 從而引起成本、可靠性、抗幹擾力等方麵的問題; 而且對光柵的運動速度還附加了限製, 必須運動平穩、無突變和相對低速等(děng)。
重慶大學彭東林教授針對這些問題提出了以時間測量空間(jiān)的時柵測試法, 並研製成功了無需高精度機械加工即可實現高(gāo)精度的時柵傳感器。時柵傳感器的工作原理是時空(kōng)坐(zuò)標轉換思想, 即建立相對(duì)勻速運動雙(shuāng)坐標係, 則(zé)一個坐標係上的位置之差(位(wèi)移(yí)) 表現為(wéi)另一(yī)個坐標係上(shàng)觀察到的時間之差。同時, 把傳(chuán)感器對刻線尺的要求轉化成了電氣問題, 因為解決基於(yú)時間的電氣問題的手段(duàn)比解決(jué)基於空間(jiān)的機械問題的手段要多得多, 先(xiān)進得多[6]。
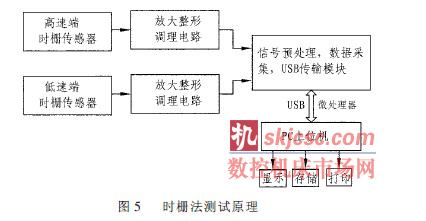
圖(tú)5 所示為時柵法的測試原理。測試時, 在傳動(dòng)裝置(zhì)的輸入端和輸出端(duān)各安裝一隻圓(yuán)時柵(shān)傳感器, 在傳動裝置運轉時, 輸入端(duān)和輸出端時柵傳感器會在一定周期內發出(chū)代表角位(wèi)移(yí)的脈衝當量, 然後進行放大等預處理, 再采用計數器通過計數分別測(cè)量其角位移, 再交由上、下位機組成的分布式誤差檢(jiǎn)測分析係統進行處理, 得(dé)出誤差曲線,分析誤差環節[7]。
時柵法實現了不(bú)依靠(kào)刻線尺而實(shí)現精密角位移測量的新技術, 大大降低了測試成本, 而且對測試現場的環境沒有過(guò)高的要求, 因此同樣可應用於生產環節, 從而具有很好的市場前景[8]。
3 結論
傳動誤差是(shì)精密傳動鏈(liàn)傳遞運動(dòng)的精確度的最重要的技術(shù)指(zhǐ)標。而傳動誤差(chà)測(cè)試方(fāng)法的選取是準確反映傳動誤差, 進而(ér)對誤差進行分析研究的關鍵。
(1) 靜(jìng)態測量具有(yǒu)一定的缺點和局限性, 但對頻率(lǜ)較低、精度要求不太嚴格(gé)的(de)傳動誤差的測量, 因為方法簡單, 造價低, 依然被人們所(suǒ)采用。
(2) 動態測量手段有磁分度法、慣性法(fǎ)、光柵法和時柵法等, 其測量準確, 各有不同的特點, 已經成為現代傳動(dòng)誤(wù)差測試的主流。但具體測試時(shí), 應綜(zōng)合考慮測量(liàng)精度與分辨率, 測量(liàng)的轉速範圍, 傳動比範圍; 可測誤差的(de)頻率範(fàn)圍以及(jí)記錄儀的頻率響應等因素, 選取合理的檢測方法。
(3) 時柵法使幾何(hé)量位移的測量擺脫了對以空間刻劃技術(shù)為代表(biǎo)的精密(mì)機械加工的依賴, 逐漸形成基於以時間計量(liàng)為代表的(de)電氣技術的新(xīn)型(xíng)幾何量位移測量的新(xīn)模式,具有廣泛的應用前景。
如果您有機床行業、企業相關新聞稿件發表,或(huò)進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com








