
基於動態特性分析的機床主軸裝(zhuāng)配故障診斷硏究(中)
2017-7-13 來(lái)源:北(běi)京交通大學 作者:李凱旋
3.主軸箱測試係統的構建
本論(lùn)文主要針對VCL850的主軸箱區(qū)域裝配問題開展研巧。需要構建相應的測(cè)試係統對主軸箱區域的信號進行采集、保存、離線處理、分析,進而確定主軸箱區域存在何種類型的裝配故障問題。因此本章重點介紹測試係統的總體結構設計、硬(yìng)件的選用L義及軟件的功能特點H方(fāng)麵的內容。
3.1測試係統的總體方案(àn)設計
針對主軸箱區域,需(xū)要檢測的內容包括;主軸箱相關區域的振動信號,主軸運行時的軸屯、軌跡等。因此需要滿足如下要求;
(1)可從滿(mǎn)足機床工作頻率範圍(wéi)內的數據(jù)精確(què)采集。
(2)可同時采集多組、不同的信號類型。
加速度傳感器主要測試VCL850主軸箱區域(徑向、軸向)附近的振動信號,電鍋流(liú)位移傳感器(qì)主要測試主軸運行狀態下的軸也(yě)軌跡,光電傳感器用於標定鍵相(xiàng)信號,激光位移傳感器用於測(cè)試主軸運行狀態下的徑(jìng)向跳(tiào)動量。
測試係統的總體方案設計如圖3-1所示。
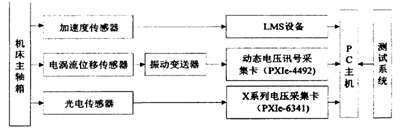
圖3-1測試係(xì)統的總體方案設計
3.2測試係統的巧件選(xuǎn)型(xíng)
選擇滿足測試要(yào)求的硬件是(shì)滿試係統的物理基礎,選擇的硬件直接影巧(qiǎo)到測試的結果,因此必須選(xuǎn)擇合理的(de)測(cè)試硬件,
(1)傳感器的選用
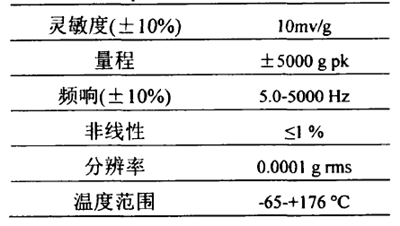
1)本論文選(xuǎn)用PCB公司生(shēng)產的35A16型的壓電加速度傳感器,內(nèi)置1C放大(dà)器,將傳統(tǒng)的壓電加速度傳感器與電荷放大器集於一體,能夠直接記錄、方便與采集設備進行連接,簡化了測試係統,提高了測試的(de)精度與可靠性,同時它具有較高的(de)信噪比,傳感器體積較小,同時在檢測範圍內具有良好的線性特性,實物圖及巧主(zhǔ)要參數指標如表3-1所示。
表3-1加速度傳感器主要參數指(zhǐ)標
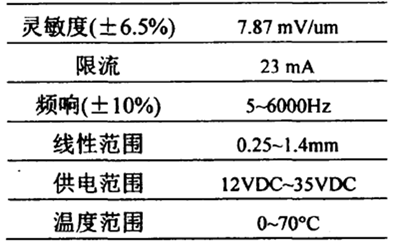
2)電渦流位移傳(chuán)感器傳感(gǎn)器采用bently公(gōng)司(sī)的3300XL11mm型產品,與振動變送器一並使用:電禍流傳感(gǎn)器用於檢測被測金屬導體與探頭端麵之間靜態和動態的相對位移的變(biàn)化檢(jiǎn)測到的振(zhèn)動信號,振動變送器負責將振動信號按照比例變(biàn)送成4至20mA信號。能夠連續準確的采集到轉子在運行狀態下的多種參數指標,例如主軸運巧狀態下的徑向跳動(dòng)豊、軸向位置W及振幅。實物圖及其主要參數指標如表(biǎo)3-2所示。
表3-2電鍋流位移傳感器主要參數指標
3)光電傳感器與PXIe-6341電壓采藥卡配合,W轉子持定位置作(zuò)為標記,獲得高(gāo)低電平信號與電禍流位移傳感器相互配合,得到相(xiàng)位信息。
數據采集係統
本論文主要(yào)利用NIPXIe ̄4492、NIPXIe-6341數據采集卡和(hé)LMS數(shù)據采集係統完成信(xìn)號的采集工作。
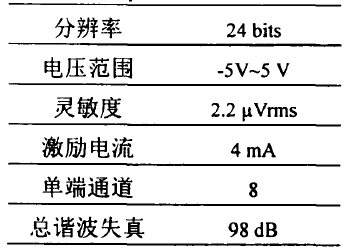
1) NI PXIe>4492是一款專為聲音和振動應用而巧計的高精度數據采集模塊(kuài)。最高(gāo)采樣率可達(dá)204.8KHZ,可攜帶8通道4X InfiniBand連接器(qì)與BNC型接頭(tóu)傳感器連接。實物圖及其主要參數指標如表3-3所示。
表3-3 PXIE-4492主要(yào)參巧(qiǎo)指標
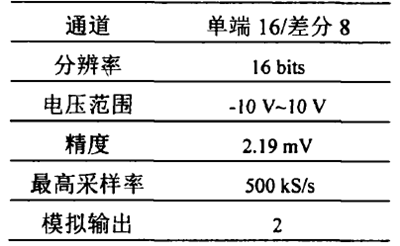
2) NI化Ie-6341具備4路32位(wèi)計(jì)數器/定時器,可高級定時和觸發(fā),配有(yǒu)NI-STC3定時和同步技術,針對PWM、編碼器、頻率、事件計數等功能均能滿足需求。實物團及(jí)其主耍參數指標如(rú)表3-4所示。
表3-4 PXIE-6341主要參數指標
引本課題(tí)采用LMS公司的LMS數據采集設備,如圖3-2所示。LMS數據采集設備專業用於對噪聲(shēng)、振(zhèn)動、聲(shēng)學和疲勞耐久性能測試,利用LMS數據采集設備對實驗對象的輸入輸出信號巧行采策分析,巧現對未知巧(qiǎo)障源位置(zhì)的有效識別。
圖3-2LMS數據(jù)采染設備
3.3測試係統的軟件總體設計
本論文采用的是美國國家儀器(N1)公司研製開發的LabVIEW軟件進行編程設計。這種閱形化編輯語言便於上手(shǒu),使用這種語言編程時,轄本上不(bú)寫程序代碼.取而代之的是流程圖或框圖。同BASIC和C-樣,LabVIEW也是一套通(tōng)用的編程係統(tǒng),內部配置可完(wán)成任何編程任務的龐大函數庫。它廣泛的應用於測試測量、控製、仿真、快(kuài)速開發(fā)、跨平台運行等各個領域(yù)。
本(běn)論文通過LabVIEW軟件將(jiāng)本論文的研巧(qiǎo)內容設計(jì)成不同的功(gōng)能模塊,主要包括:加速度信號的測試和位(wèi)移信號的測試。其中兩個領域裏麵又由(yóu)不同的子模塊構(gòu)成。具體包括;原(yuán)始數據的采集、濾波、隔直、頻譜分析、軸屯、軌跡測試、數據保存、故障(zhàng)識別等功能。軟件測試係統(tǒng)的功能模塊如圖3-3所示。
A.加(jiā)速度測試(shì)模塊
NIPXIe-4492最離采樣率可達204.8KS/S兩方麵(miàn)因素,設置采樣(yàng)率40%Hz,采(cǎi)樣數4096。
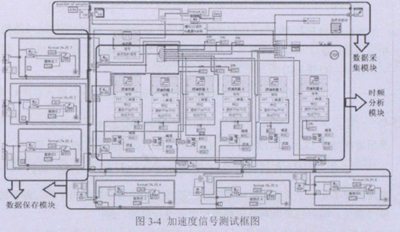
加(jiā)速度傳感器共(gòng)有6個采集數據通道,首先通過數據采集(jí)模塊將原始(shǐ)數據寫入計算機,然後(hòu)通過數據分流(liú),分(fèn)配到(dào)單數據分析模塊(kuài),進行時頻域分析,也可對特定頻率的信號幅值進(jìn)行監測。由於選用連續采集的方式,程序始終處於while循環狀態,.需要LabVIEW軟件的生產者-消費者模式對循環(huán)數據實(shí)時輸(shū)出,保存。也可在離線狀態下對數據進巧(qiǎo)處理分析。加速(sù)度信號的程悼框圖如圖3-4所示。
B.位(wèi)移(yí)測試係統
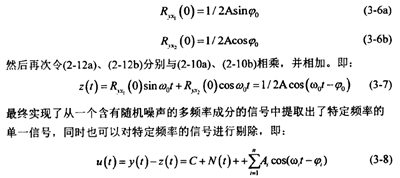
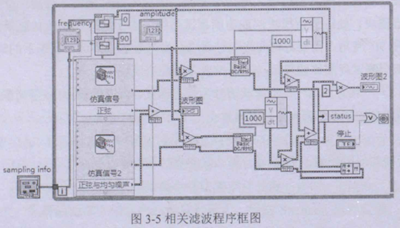
位移測試係統主要將(jiāng)電禍流傳感器測得的信號(hào)進(jìn)行(háng)采集、處理、分析。其數據采集模(mó)塊、處理分析模塊同(tóng)加速(sù)度測試係統,由於兩路(lù)電鍋流傳感器同時采集且互成90度角,需要(yào)對這兩路信號合成,實時顯示主軸運行狀態下的軸也軌跡。由於(yú)整(zhěng)個測試界(jiè)麵比較複雜,下麵主耍介紹幾個模塊:(1)相關濾波W:帶濾波信號為帶有諧波、直流偏置(C)、隨機噪聲(7^(0)等成分的複雜信號y的,表示為;
相關濾波器的程(chéng)序巧圖如圈3-5所示。
(2)相位測量
本論文(wén)可根據(jù)多重相關(guān)法和FFT分析法對相位進行測量。多重相(xiàng)關法可L:A有效消除隨(suí)機噪聲對主信號(hào)的影響,設兩組含隨機噪聲(shēng)的(de)兩路(lù)信號為x(f)、y(<)表達式為:

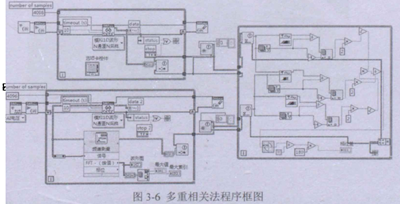
利用多重相關的方法,可w更有效的去除外界(jiè)噪聲幹擾,綜(zōng)合考慮本論文采用二重相關法測試電鍋流位移傳感器與(yǔ)光電傳(chuán)感器測得的信號(hào)相位差,程序框圖如圖3-6所示:
利用X、Y兩向電禍流位移傳感器和光(guāng)電傳感器測試對主(zhǔ)軸的(de)軸必(bì)軌跡進行檢(jiǎn)測,軸‘6軌(guǐ)跡(jì)測試的流程酬圖3-7所示。
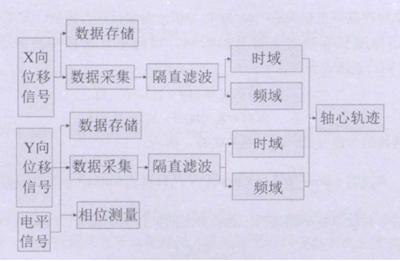
圖3-7軸(zhóu)屯、軌(guǐ)跡測試(shì)的流程困
3.5本章小(xiǎo)結
本辜苗先介紹了機床主軸箱區域常化的幾種主要的裝配故障類型,產生這幾種故障的機(jī)理和對應的信號將征,為(wéi)接下來的機床主軸箱醫域(yù)檢測、故障類型的判別提供了理論依據;其次介紹了對主軸箱區域(yù)進(jìn)行(háng)撿測之前選用的硬件設備和相關技術參數,利用LabVIEW設計了主軸箱區域的檢測係統和主耍的(de)功能模塊,為接T來(lái)的信(xìn)號(hào)檢測做好準備。
4.主軸(zhóu)箱裝配故障的模擬實驗
第二章主要針對主軸箱區域可能存在何種類型的(de)裝配故障及其內在機理進行了分析(xī)研巧,第H章就圍繞主軸箱(xiāng)區域構建的測試係統進行了詳細介紹。為了更(gèng)好的對主軸箱區域的裝配故障(zhàng)類型進行判(pàn)斷,需要在實驗室開展針(zhēn)對性的模擬實驗,觀察不同的裝配(pèi)故障類型在時域、頻域、軸也軌跡等表現什麽樣的信號特征。方便後續去機床現場進行信號測試時提供一定的數據參考。因此本章針對主軸箱區域幾種主要(yào)的裝配故障類型開展了(le)相關的模擬實驗。
如圖4-1為轉子實驗台,由模擬台調速器控製轉速大小。可通過對轉子實驗台上的不同部件進行人為的裝配調整(zhěng),模擬實際工況的不同類型的裝配故障。圖中可看到,利用第H章選用的硬件和構建的(de)測試係統對轉子實驗台進巧(qiǎo)檢測(cè)分析。兩個(gè)電(diàn)禍流位移傳感器互相垂直,測試轉子在運動狀態下的徑向跳動量;光電傳(chuán)感(gǎn)器(qì)在標記位置確定基準相位:光電傳感器照射到標(biāo)記位置時為高電平(píng),其他位置為低電平。
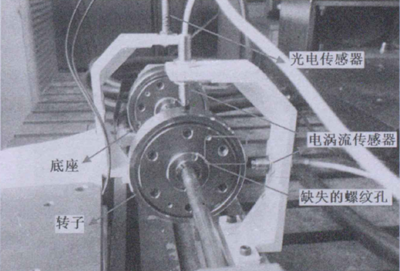
圖4-1轉子實驗台
4.1動不平衡實驗
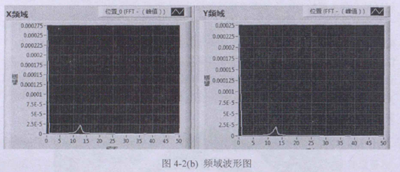
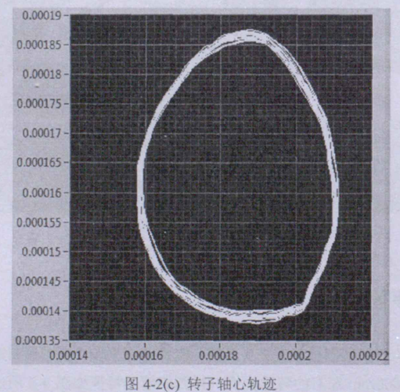
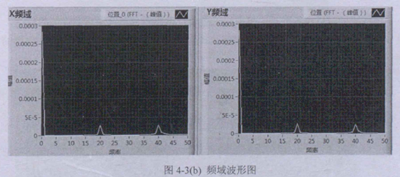
圖4-1的轉子某部位存在缺失螺釘,模擬動不平衡。模擬(nǐ)台(tái)調速器將調整轉子L的轉速,800巧m左右的轉速為例,得到的信號特征如圖4-2所示。
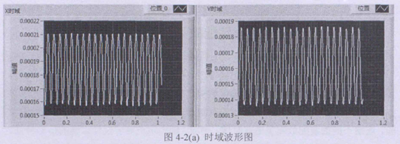
適然存在直流分量,但不(bú)影(yǐng)響信號特征。兩個電鍋流傳感(gǎn)器的相位基本穩定在(zài)57°和150°左右,證明動不平(píng)衡位置與基準相位呈(chéng)57°左右(yòu)夾角,兩個電巧流傳感器互成93。夾角。動不平巧的信號特(tè)征主要表(biǎo)現為:
(1)在轉子徑向測得(dé)的頻譜圖上,頻(pín)譜能量集中在基(jī)頻(轉子轉速對應的頻率),轉速(sù)頻率成分有突(tū)出(chū)的峰值(zhí);
(巧轉速頻率的數倍於(yú)基(jī)頻的頻譜幅值(zhí)很低,時域上的波形接(jiē)近於正弦波,且基(jī)頻對應的幅值隨(suí)轉速的升高而變大,相位比較穩定。
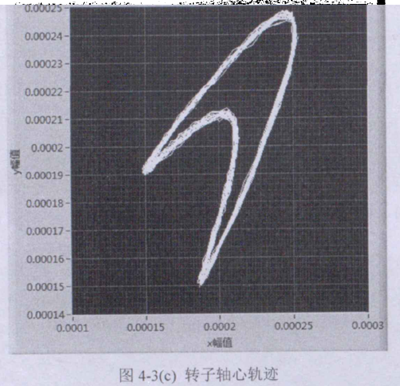
(2)由於轉軸在各個方向上的支承剛度存在(zài)差別,轉子不平衡(héng)表現在x、y方向的(de)幅值也不同,轉子的軸屯、軌跡接近於楠(nán)圓形。
4.2不對(duì)中故障實驗
將轉子實驗台的一(yī)端(duān)底座用墊片墊離造成兩端底座商低不平,使轉子與轉軸形(xíng)成一定夾角,模擬不對中問題。利用模擬台調速器調節轉速,WnOOrpm左右
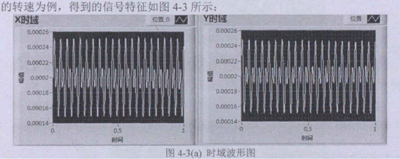
可L義管到轉子不對中時,運轉狀態下(xià)的—倍頻幅值明顯(xiǎn),軸屯、軌跡呈香蕉形。綜合本實(shí)驗及(jí)文獻可(kě)知,轉子不對中(zhōng)引(yǐn)起的故障主耍信號特征為",iwi:3
(1)若對振動信號(hào)進巧頻譜分析,其頻譜成分主要W—倍頻和二倍頻為主轉子不對中的程度越嚴重,二倍頻的幅頻特性越明顯,其至超過一倍頻。
(2)從轉子徑向(xiàng)檢(jiǎn)測其信號,其兩個方向的時域波形類(lèi)似崎變的正弦波。轉子的軸屯、軌跡呈香蕉形I當二倍頻的幅值更加明(míng)顯時,其(qí)軸'。軌跡(jì)呈8字形。
4.3鬆動故(gù)障實驗
使底座的螺巧略為鬆動(dòng),模擬鬆動故障。將模(mó)擬台(tái)調速器調到較低的巧速,L:A600巧m為例,為了更加(jiā)便(biàn)於(yú)觀(guān)察,對信號(hào)采取直流分量(liàng)隔(gé)離的(de)措施。測得的(de)信號特征如圓4-4所示:
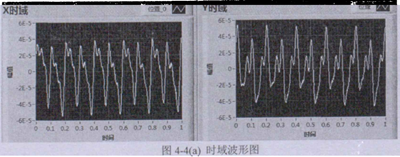

綜合本次實驗及文獻調(diào)研得出旋轉機械的鬆動故障其信號特征表現為IWI:
(1)對振動信號進行頻譜分析時,產生鬆動的對應方向與其(qí)他(tā)方向的頻譜(pǔ)信息差異很大:產(chǎn)生鬆動的方(fāng)向除了基頻信號、出現了更(gèng)多的倍頻,甚至分數倍頻,鬆動方向的振動越強烈、高頻信息(xī)越豐富;其他方向的頻譜信息較少。
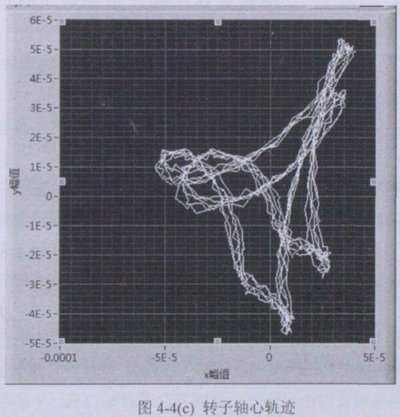
(2)鬆動使得機械結構的結合麵出現(xiàn)間隙(xì),機械係統表(biǎo)現出非線性特征。出(chū)現鬆動故掩的轉子其軸也軌跡(jì)更加(jiā)混亂、重也漂移。
4.4本章(zhāng)小結
棉棚轉f自驗(yàn)自壯科日駐獅(shī)劍日雜類麵浦織驗,分別獲得了動不平衡、角度不對中、鬆動(dòng)三種(zhǒng)故障在工作狀態下的時(shí)頻域及軸也軌跡(jì)的信號特征(zhēng),可W得出初步結論:動(dòng)不(bú)平衡故障與基頻相關軸屯(tún)、軌跡(jì)表現為(wéi)楠圓(yuán);角度不對中故(gù)障與基頻二(èr)倍頻(pín)相關(guān)軸屯、軌跡表現為香蕉形或(huò)外八字形,鬆動故障的頻域特征較為複雜,軸屯、軌跡無規律。為接下來對工作(zuò)現(xiàn)場的主(zhǔ)軸箱區域的信號采集及分析提供了數據(jù)支持(chí)。
5主軸箱區域的信號采集及分析
通過就不(bú)同類型的裝配故障進行模擬實驗(yàn),對(duì)不同類型裝配故障所表現的信號特征有了(le)一定的認識和了解,本章主要針對(duì)機床現場,對運(yùn)行狀態下的主軸箱區域的信號進行采集及分析,主要(yào)包括;加(jiā)速度傳(chuán)感器位置如何確定、加速(sù)度信號的采集分析、主(zhǔ)軸運行狀態下徑向位(wèi)移信號、軸屯(tún)、軌跡的采集分(fèn)析、故障類型的識別判定等。
5.1機床主軸箱加速度信號的采集及分析
5.1.1加速度(dù)傳(chuán)感器位(wèi)置的確定
加速度傳感器對故障產(chǎn)生時伴隨(suí)的振動信號十分敏感,因此需要采(cǎi)集時域(yù)內主軸箱的(de)振動信號,iU便用於(yú)後續的分析研巧。如何利用有限的傳感器放置在主軸箱的最佳測試位置,便於後續的檢測與分析,這是一個命題,模(mó)態試驗分(fèn)析領域稱之為:響應點優化布置IW。本論文(wén)借鑒模態試驗中常用的模態動能法和有效獨立法,為解決實際工況下傳感(gǎn)器優(yōu)化布置的問題提供一種思路。
模態動能法|M1(MKE)W測得的模態動能最大為目標來選擇傳感器的位置進而提高結構動態響應測量。有效獨立法(fǎ)1^]巧1)在模(mó)態動能法的基礎上每個傳感器測點對模態(tài)向量線性獨立的(de)貢獻最大為(wéi)目(mù)標,逐步(bù)刪除有效獨立向量具有最小值(zhí)的節點(diǎn),與此同時不(bú)斷優化改進Fisher矩陣,最終(zhōng)達到的效果使感興趣的模(mó)態振型在較少測點的情況下,盡可能保持線性獨立,在測試中用有限的傳感器(qì)獲取最大的模態信息。
本文結合上述兩種方法,應用於機床主軸(zhóu)箱區域(yù),在工作頻(pín)率下實現對傳感器(qì)的優化布置,將不同頻(pín)率(lǜ)下對(duì)應的工作變形認定(dìng)為不同階模(mó)態振型,利用有限的傳感器實現對不同頻率下主軸箱最大形變區域的有效識別。
對(duì)於振動(dòng)係統:係統(tǒng)振動具有動能(T)和勢能(U),可表示為:
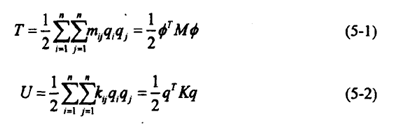
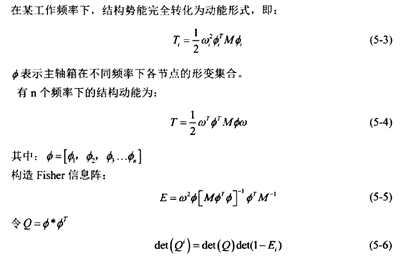
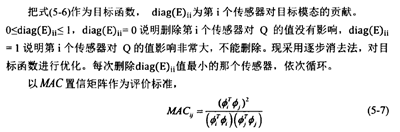
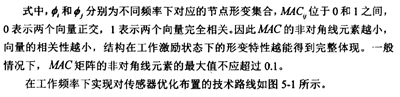
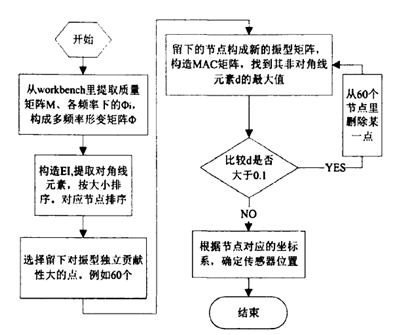
圖5-1傳感器優化布置(zhì)的巧術路線
主軸箱在空轉狀態進行測試,受到的外界激勵較弱(ruò),主(zhǔ)要受到主軸自(zì)身轉動產生的(de)離屯(tún)、力作用,利用ANSYSWorkbench對主軸箱區域進行仿(fǎng)真分析,模擬實際工況,如(rú)圖5-2所示。ANSYSWorkbench作為線(xiàn)性分析(xī)軟件,外界(jiè)激勵的變化不會改變(biàn)主軸箱區域的應力分布情況,軸箱(xiāng)區域的動態應力、應變幅值隻會等比例的發生(shēng)改變。因此對主軸箱區域施加的邊界條件為:四端固定約束,主軸附近受到離屯、力矩設定為lOOON.mm,經過網格劃分;53769個節點。
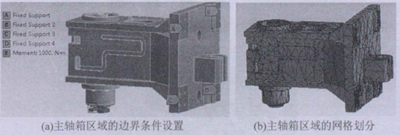
圖5-2主(zhǔ)軸箱仿真模型
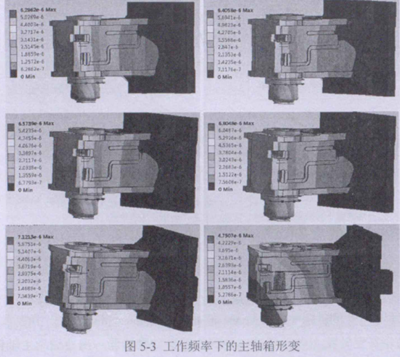
主軸一般的工作轉速(sù)為3600?9600rpm,對應頻率區間為(wéi)60 ̄120Hz,主軸箱在實際工作狀態(tài)下,不同頻率點對應的工作變形是不同的,稱(chēng)之為工作變形分析(ODS),利用有(yǒu)限的傳感器實現對不同頻(pín)率下最(zuì)大形變位置的有效識(shí)別(bié)。這與利用有限的傳感器實現對不同模態振型的有效識別(bié)有著共同(tóng)之處。由於機床的工作頻率區間在60~160HZ,因此本論文(wén)的分析頻率點分(fèn)別(bié)為60、80、100、120、140160Hz,表(biǎo)5-1分別為60、80、100、120、140、160Hz 下(xià)的形變。
假設經過有限(xiàn)元網格劃分後(hòu)的節點均可作為傳感器布置的位置(zhì),即所有節(jiē)點布置加速度傳感(gǎn)器,得到的mac矩陣(zhèn)值如表5-2所(suǒ)示:
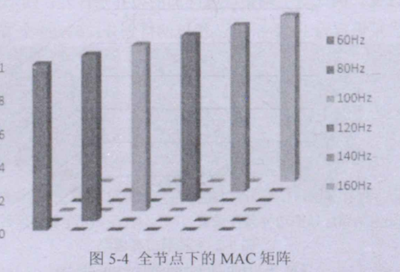
由此可見利用MAC矩陣作為評價齒數,在全節點下(xià)的(de)非對角線最(zuì)大元素僅(jǐn)為8.01E-05,完(wán)全對工作頻率下的(de)主軸箱形變實現了有效識別。
由於存在53769個節點,首先從ANSYSWorkbench中篩除沒有形(xíng)變的節點(diǎn),主要分布在與固定約束靠近的區域,圖5-3中的藍色區域。這樣節省了(le)大量的(de)計算時間。利用(yòng)MATLAB軟件對節點逐步消減,由圖4-2可(kě)知,60個節點之(zhī)前,明5-:5)式作為評價南數,60個節(jiē)點之後(hòu)L;|(5-7)為評價函數。傳感器的求解走勢如圖5-5所示:從3800個節點到60個節點,再從60個節點到1個節點兩個階段。橫坐標為(wéi)節點數,縱(zòng)坐標為MAC矩陣非對角線最大元素值。
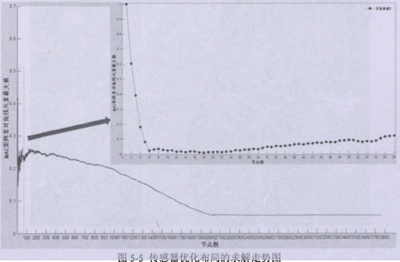
由圖5-3可知(zhī),在剰餘6個節點(即傳感器數目為6個)的時候,既經濟又能巧兼顧(gù)識別各(gè)個頻率下最大形變效果。剩餘數目為30時,在主軸(zhóu)箱區域的節(jiē)點分布如(rú)圖5-6所示。

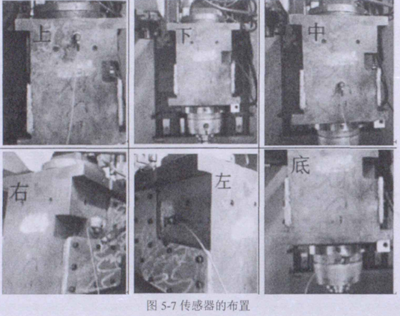
可贈到:有的節點在主軸箱的內部,實(shí)際上傳感器是沒辦法放置的,經過排除,齡6個節點分布(bù)在主軸箱上、中(zhōng)、下(xià)、底、左、右六個(gè)位置(zhì),誦5-7 所示。
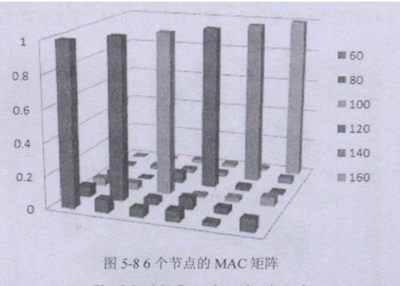
剩餘六個節點位置的MAC矩(jǔ)陣如圖(tú)5-8所示。非對角線元素最大值為化081576,主軸箱在各頻率對(duì)應下的形變能夠得到有效識別,滿足要求(qiú)。
5.1.2加速度信號的采集與分析
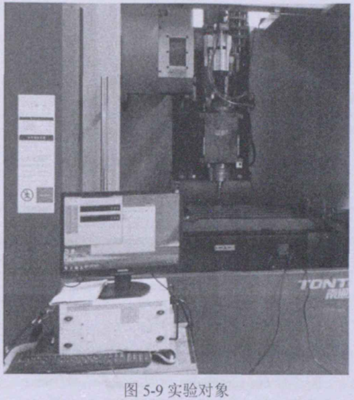
本次實(shí)驗レッ南通化床某台存在故障但未發(fā)現原因的VCL850立式(shì)加工中屯、為對象,首先在化(huà)床開啟的狀態下對主軸箱區域的振動信號進行檢測及分析,由於主軸(zhóu)的轉速區間為48?12000rpm,擬定W600rpm為一間隔,從60(K9600rpm測試主軸箱區域的振動情況。測試(shì)現場如圖5-9所示。
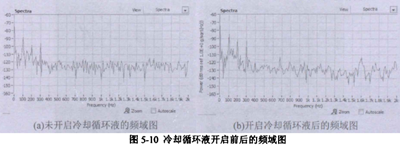
在主軸空轉之前對冷卻循環液開啟前(qián)後的測(cè)試數據進行了分(fèn)析(xī),在六個部位(wèi)觀察頻域圖(tú),發現未產生明顯變化(huà),隻在高頻區間(jiān)產生了影響。說明:冷卻循環液對主軸(zhóu)箱區域的影響不大。主軸箱中部的測試數據為例,如圖5-10所示。
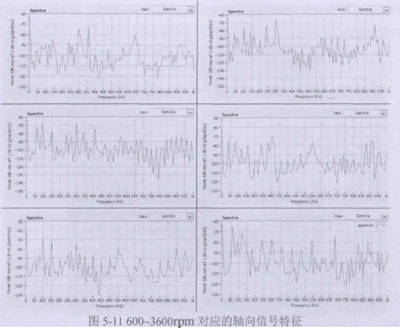
利用H向加速度傳感器,可W同時檢測(cè)主(zhǔ)軸在不同轉(zhuǎn)速下的軸向和徑向的(de)振(zhèn)動情況。現;^^主軸前(qián)端(duān)為例,觀察主軸在600?8400rpm之間的時頻(pín)域圍:在0?3600巧111區間,(^^?(18(分貝)表征其幅值,雖然從1800巧〇1開始,主軸轉速對應頻率的幅值開始突出,但(dàn)其軸向、徑向的振動特征(zhēng)與其(qí)他頻域幅值相差不(bú)大,幅值的數量級在le-6級。主軸在(zài)徑向的振動特征(zhēng)與軸向比較,幅值更小,數量(liàng)級在5e-7級(jí),W軸向信號特征為代表如圖5-11所示。
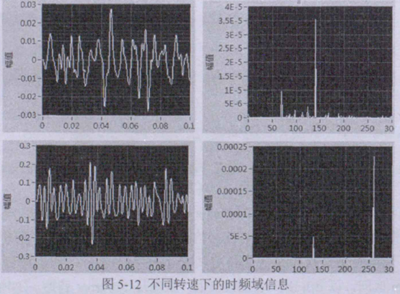
從4200rpm開始,信號特征變(biàn)得明盈,主要表現為一(yī)倍頻二倍頻。W主軸前端(duān)上部(bù)為例,分別4200rpm、7800rpm為例觀察(chá)時頻域圍。化圖5-12所示,左列為時域信號,右列對應頻域信號。
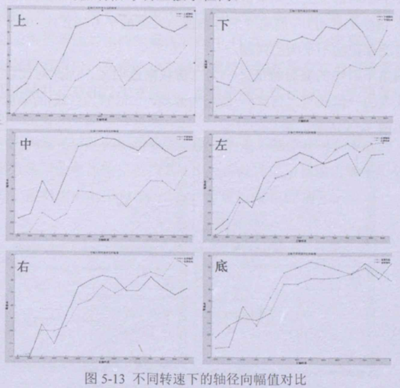
利用MATLAB將K麵將主軸上中下底左右六個(gè)部(bù)位巧不同轉速下的軸向、徑向幅(fú)值進行對比(橫坐標為轉速,縱坐標為幅值,藍線為軸向,紅(hóng)線為徑向)如圖5-13所示。可(kě)以(yǐ)發現軸向的振動信號明顯強於徑向。
對比主軸箱(xiāng)區域上中底左右(線條顏(yán)色分別為黑綠(lǜ)紅藍紫)五個部位的軸向、徑向幅值,如圖5-14所示。可發現軸向的(de)信號(hào)隨轉速變化(huà)的振動(dòng)趨勢基本一致,徑向的(de)信號隨轉速變化的振動趨勢卻差異很大。
(1)軸向在上中底左右五個部位(wèi)的幅值走(zǒu)向基本一致,上中下部和底(dǐ)、左右側的幅值成平行關係,這(zhè)是由(yóu)於主軸箱在(zài)底端、左(zuǒ)兩端、前端的壁厚各不相同,因此測得的信號強弱也會不(bú)同。
(2)徑向在上中底左右五個(gè)部位(wèi)的幅值走向出現(xiàn)差異。左右側的幅值基本fc成穩步上升態勢,上中下的幅值隨轉速呈無規則的變化。主軸巧電機通過同步內齒帶(dài)輪(lún)連接,可能由於帶輪張緊力的作用,導致主軸局部(bù)受力(主軸頂部)過大(dà),因此分布在轉子不同部位的(de)徑向幅值產生差異。
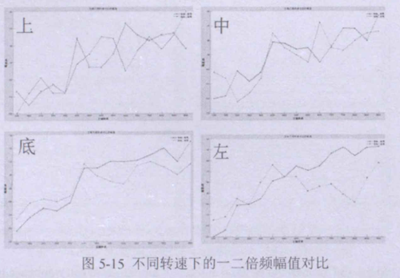
(3)由(2-1)式可知,加速度信號幅(fú)值(zhí)與轉速的(de)平方成正比,由圖5-14可知,主軸區域可能存在動不平衡的問題。由於偏角(jiǎo)不對中的顯著特征之一為二倍頻幅值明顯,因此對比上中底(dǐ)左四個部位為代表的一倍頻與二倍頻(一倍頻為藍線,二倍頻為紅線)的幅值也能印證上述結論,如(rú)圖5-15所(suǒ)示。
為了進行驗證由加速度化睡器測試分析得出(chū)的結論,下麵針對主軸運斤狀態下的軸屯、軌跡進(jìn)斤測試、分析。
5.2機床主(zhǔ)軸的軸心軌跡測試
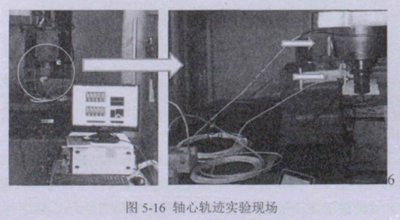
W同樣的加工中屯、為實驗對象,對其主軸運行狀態下(xià)(600巧m?8400rpm區間)的軸屯、軌跡進行檢測,觀察其軸也軌跡(jì)的(de)變化情(qíng)況。軸‘心軌跡實驗現場如圖5-16所示。
實驗注(zhù)意事項:
(1)傳感器的安裝:兩(liǎng)個電禍(huò)流傳感器彼此要盡量保證90度,由於電禍流傳感器探頭據測試對(duì)象的測量區間在0.41?2mm,因此既(jì)要(yào)保證安裝距離在規定量程範(fàn)圍內,又要防止主軸開啟時劇階(jiē)到探頭,造成傳感器損壞。
(2)由於主軸開啟後和每次變速(sù)後(hòu),都會引起工作台振動,必須在將傳感器放(fàng)置在一個有足夠重的質(zhì)量塊。
(3)由於電鍋流傳感(gǎn)器經振動變送器輸(shū)出的電壓幅值在15.6V,而PXIe-4492數據采集卡(kǎ)的電壓輸出範圍為±5V,因此在變送器輸出端采用分(fèn)壓電阻(zǔ)的(de)方式,使得輸(shū)出電壓為3VW內。原(yuán)理如(rú)圖5-17所示。
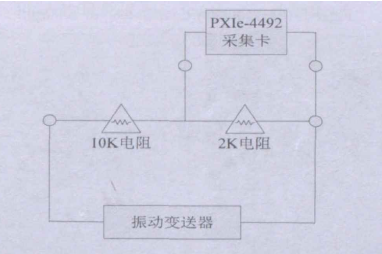
圖5-17分壓電阻圖
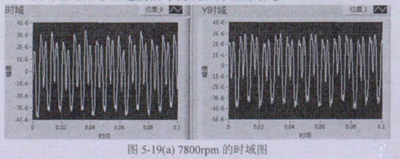
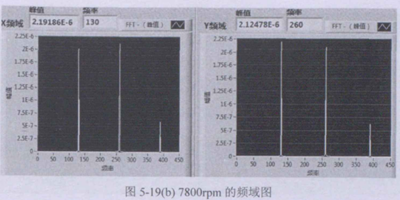
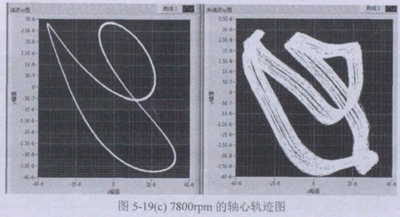
在1200?8400 rpm區間,檢測主軸的軸(zhóu)心軌跡,采樣(yàng)率為4096Hz.采樣數為(wéi)4096,其時域頻域隨著轉速的改變基頻、倍頻亦發生改變,但軸(zhóu)屯(tún)、軌跡基(jī)本保持一致,W3000rpm、7800rpm 為代表,圖5-18(a)為3000rpm的時域圖(tú)、圖5-18(b)3000rpm的頻(pín)域圖、圖5-18((:)為3000巧111的(de)軸屯、軌跡圖;
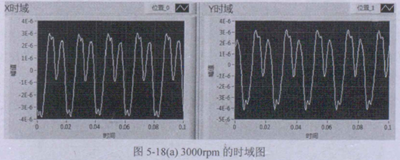
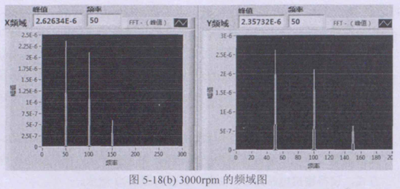
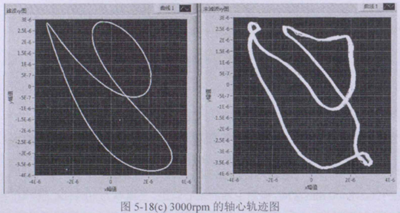
圖(tú)5-18(c)的左側為濾波後的軸(zhóu)屯、軌跡圖,圖5-18(c)的左側為濾波後的軸必軌跡闡,濾波采用己特沃茲濾波器型低迪濾波器,截(jié)止頻率為500Hz。圖5-19(a)為7800rpm的時域圖(tú)、圖5-l%b)7800rpm的頻域圖、圖5-19似(sì)為7800rpm的軸屯、軌跡(jì)留,低轉速下的軸也軌跡較高轉速的軸也(yě)軌跡更為(wéi)清晰,但總體均為外8字形,主耍(shuǎ)由一倍頻、二倍頻構成,也出(chū)現了H倍頻,這與(yǔ)偏角不對中的信號特征描述是一致的,同時也印證了加速度信號測試後得出的結論:
針對上(shàng)述實驗對象的實驗結果,現對某台正常使用的機床(chuáng)主軸軸必軌跡進斤測試,觀察其(qí)軸必軌跡。如圖5-20所示。

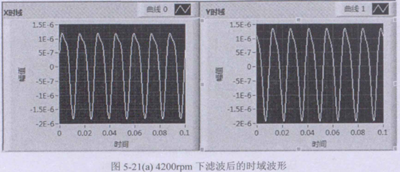
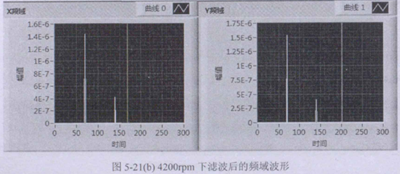
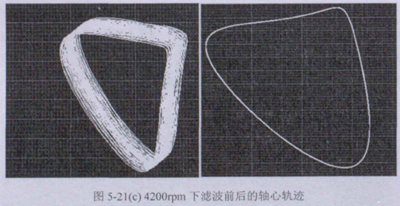
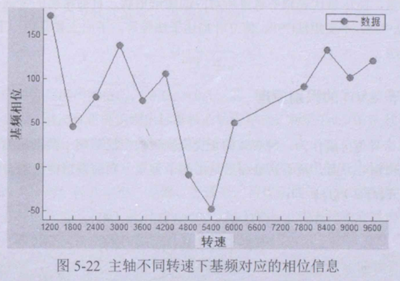
在4200rpm下,采用相關濾波器(qì)對采集的數據進行(háng)處理後(hòu)的時域波形如圖5-21(a)所示,頻域波形如圖5-2l(b)所巧,濾波前(qián)後的軸(zhóu)屯、軌跡如圖5-21(c)所示(主要濾掉5〇Hz的交(jiāo)流電(diàn)源頻(pín)率)。
對比兩姐數據,可發現:
(1)雖然本次實驗對象工作狀態下的主軸依舊存在二倍頻,但與未調試機床的實驗數據相比,幅值並不明顯。最大信號為基頻信號,軸必軌跡(jì)為類圓形。
(2)未調試機床(chuáng)的(de)信號幅值(zhí)在(zài)l5^lm左右(yòu),測得的可正常使用(yòng)的機床信(xìn)號幅值在如m左右,從這(zhè)個角度也可看出,未調試機(jī)床的主軸徑向跳動過大。
(3)由(2-1)可知,動不平衡的表(biǎo)征為(wéi)基頻信(xìn)號的振幅(fú)與轉速的平方成正比,從(cóng)兩次實驗對象的數據看,基頻的振幅均穩定在一定範圍內,因此主軸不存在(zài)動不平衡問題。
圖5-22為VCL850主(zhǔ)軸在1200?9600rpm範圍的基頻相位信息。可看出基頻對應的相位信息並不穩定,也說明了(le)主軸與刀柄安裝位置不存在明顯的動不平衡問(wèn)題(tí)。
5.3基於軸心軌(guǐ)跡的故障類(lèi)型識別方法(fǎ)
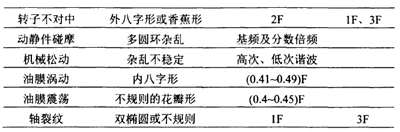
軸(zhóu)屯、軌跡是旋轉機械的重要信號表征形式,目前軸屯、軌跡的形狀識別作為判斷設備故障的重要依據,在旋轉機械(包括水電機組(zǔ))的狀態監測與故障診斷中得(dé)到一定(dìng)應用IW1。通(tōng)過軸屯、軌跡對應的圖形形狀的識別,可進一步分析設備振動的原因(yīn),得到故障征兆,及時采取措施防止機械巧障進一步惡化。長期的理論(lùn)和實踐研(yán)究已經確立了幾種典型的(de)機械故睹模式及其轉子軸屯、軌跡形狀的對應關係,幾種常見的軸必軌跡圖形及其故障原因(yīn)見表5-1。
表5-1常見的軸必軌跡圖(tú)形及其故巧原因
對軸屯、軌跡的識別本質(zhì)上就是對二維圖像的識別,主要包括特征提取、分類識別(bié)兩個方麵。特征提取(qǔ)是從軸也(yě)軌跡中提取能(néng)反(fǎn)應軸也(yě)軌跡本原的、重要(yào)特性的特征向量(liàng),能盡量代表軸屯、軌跡所對應的圖形形狀。目前常用的特征提(tí)取方法(fǎ)有SVD法IMW、不變矩法170-"1、傅立(lì)葉描述子(zǐ)法等等。下麵(miàn)主要介紹一下SVD法和不變矩法。
5.3.1基(jī)於SVD的(de)識別原理
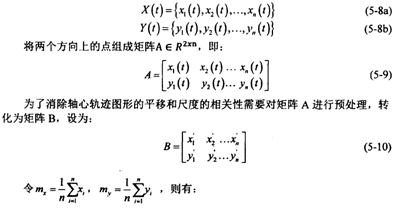
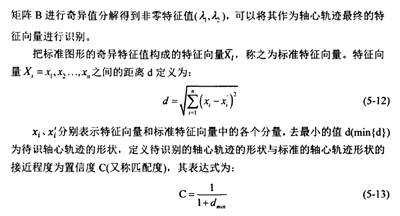
矩陣奇異值分解作為一(yī)種有效的正交變換目前廣泛應(yīng)用於數據壓縮、信號處理、模式識別(bié)等方麵。軸也軌跡圖形是由兩個垂直(zhí)方向的波形信號組合(hé)而成。離散(sàn)化設為(wéi)乂(ài)(0、7(0,艮P:

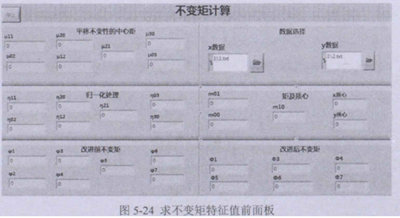
5.3.2基於不變矩的識別原理
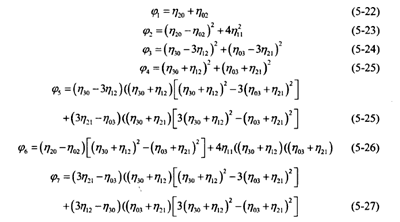
不變矩法(fǎ)於1962年(nián)由Hu提出,並運用代數方法證明了其不變性,隨後許多學者對不變矩進行了(le)較深入的理論(lùn)與實際(jì)應用的研究,不變矩的理論得到了逐步完善,在(zài)模(mó)式識別與圖形處理等領域獲得了較為廣泛的應用ini。定義在平麵(miàn)上的二(èr)維函(hán)數/〇c,:V),它的(de)p+q階混合原點矩定義為:
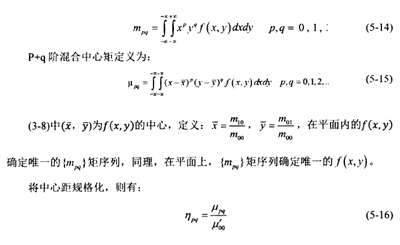

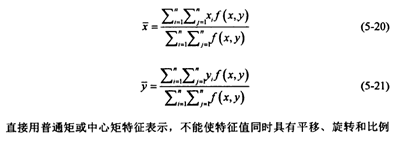
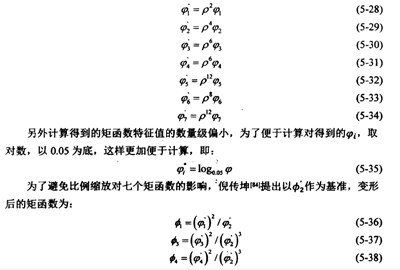
不變矩的特性。若利用歸一(yī)化的中也(yě)矩,則特征不僅具有平移不變性,還具(jù)有比例(lì)不變性。這樣,可L義利用歸一化的中屯、矩的(de)線性組合,達(dá)到待識別的圖形具有(yǒu)平移、旋轉、比例不變性的特征。HuMK利用代數不變量理論構造了韋個不變矩函數式。
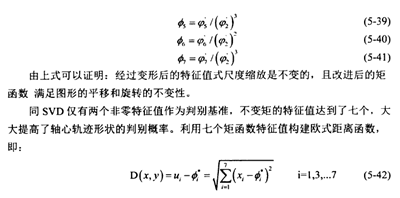
通過反複(fù)實驗(yàn)發現:七個函數在離散情況下對尺度縮放是敏(mǐn)感的,而且經過定性(xìng)分析變化原因從之前的推到可tA得出W下結論:若(ruò)圖形尺度變化因子為P,則變化後的矩函數與原畫數的關係為:
5.3.3VCL850主軸的軸心軌跡識別
利用(yòng)LabV舊W軟件編製幾組不同的標準軸屯、軌跡形狀,此作為不同主(zhǔ)要的裝配故障類型的軸屯、軌跡圖形基準,同(tóng)樣利用LabVIEW通過(guò)基於SVD和不變兩種方法對實驗測得的軸也軌跡(jì)進行(háng)識(shí)別方法。相互垂直的信號表達式分別為x(t)和y(t),其表達式為;

利用LabVlEW軟件根據(3-3如式設計(jì)得到(dào)不同形狀的軸屯、軌跡合(hé)成信號五種不同類(lèi)型的(de)軸也軌跡形狀:滿圓、外八(bā)字形、內八字形、花(huā)瓣形、香蕉形。如圖5-25所示
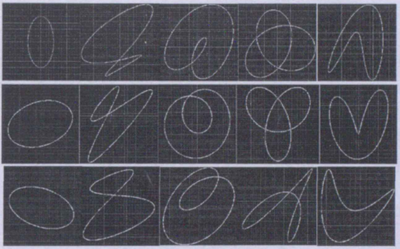
圖5-25不同的軸心軌跡形狀
每種類型的軸屯、軌跡(jì)形狀求解H組(zǔ),排除偶(ǒu)然因素的幹擾,為(wéi)後續的SVD法、不變矩法提供評價標準。
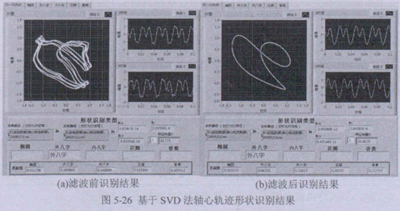
利用SVD法對(duì)VCL850立式(shì)加工(gōng)中心測得的軸屯、軌跡形狀進行識別(bié),得到(dào)外八字形(xíng)的(de)識別結果,濾波前後的軸屯、軌跡識別結果如圖5J6所示。
濾波前後形狀置信度(匹配度)參數如下表5-2,表5-3所示:
表5-2未濾波的形狀置信度(dù)參數
表5-3濾波後的形(xíng)狀置信度參數
由結果可UJ?看出基於SVD法實現了軸屯、軌跡形狀的有效識別。但由於SVD法的特征值維數較低,待識別形狀的置信度參數較低,針對局部(bù)變化敏感的軸屯、軌跡形狀,此種方法(fǎ)的識別率更會降低。
基於不(bú)變矩法對圖5-25的五種(zhǒng)不同軸屯(tún)、軌跡的形狀進(jìn)斤矩(jǔ)函數計算,同時每種類型的軸屯(tún)、軌跡形狀的函數值求(qiú)平均,得到的毛個特征值如表5-4所示;
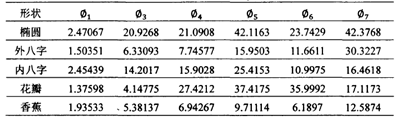
對實驗測(cè)得的軸屯、軌跡(jì)形(xíng)狀進行矩函數計算得到的屯個特征(zhēng)值如表5-5所示:
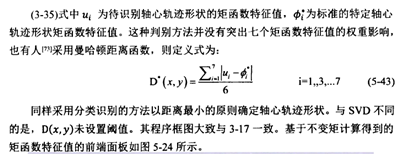
利用(5-42)式對待識別(bié)圖形進行計算得(dé)到的數據(jù)如表5-6所示。
表5-6基於(5>42)式的識別結果
利用(3-37)式對(duì)待識別圖形進行計(jì)算得到的數據如表5-7所示。
表5-7基於(yú)(5-43巧的識別結果
由兩種判別方式均可W得到正確的結果,但是內(nèi)八字形和香(xiāng)蕉形(xíng)的數據產生了很大的變化,從處理的數據結果發現使用(5-42)式作為分類識別過程中(zhōng)的判別依(yī)據較為合理。
將SVD法和不變矩法相結合,對軸必軌跡的形狀進行判定:
1)當SVD法與不(bú)變矩法的判定結(jié)果一致時,認定判(pàn)定結果正確。
2)當SVD法與(yǔ)不變矩法的判定結果不(bú)一致時,認定判定結果失效。
這(zhè)樣將同時考慮了兩(liǎng)種方法,提高軸必(bì)軌跡形狀識別的正確率。
由於表征軸屯、軌跡形狀的特征值達到了七(qī)個,因此基於不變矩法識別的正確率(lǜ)較SVD法要更加明顯,但基於不變矩法,即(jí)使同樣(yàng)形狀,得到的特征值也是(shì)存(cún)在差異的。本論文結合兩種方法對軸也、軌跡進行識別,提髙了識(shí)別的(de)正(zhèng)確率。
5.4本章小結
本章在(zài)前(qián)麵章節(jiē)的基礎上,利用構建(jiàn)的測試係統對(duì)主軸箱區域的振動信號(hào)進行了測試,有下成果:
(1)結合模態(tài)動能法與有效獨立法,將應用於模態試驗中的傳感器優(yōu)化布置(zhì)問題運用到工作激勵狀態下(xià)的傳感(gǎn)器優化布(bù)置問題上,提出了在工作激勵下解決傳(chuán)感器(qì)優化布置問題的(de)一種方法。
(2)對采集的信號通過分(fèn)析發(fā)現:主軸(zhóu)箱區域的(de)振(zhèn)動信號與主軸轉速密切相關,基頻、二倍頻信號明顯,屬於(yú)不對中的故障特(tè)征,主軸區域的徑向幅值隨轉速(sù)成正相關關係,屬於動不平(píng)巧的故障恃(shì)征。
(3)對主軸軸也軌跡進行了在線測試,發現基頻、二倍頻信號十分突出,運行狀態下的主軸軸也軌跡呈外八字(zì)形(xíng),符合角度不對(duì)中的故障特(tè)征,測試對象在不同轉速下的基頻相位(wèi)並不穩定,說明主軸與刀柄安裝位置不存在明(míng)顯的動不平衡問題。
(4)利用SVD法(fǎ)和不變矩法W軸屯、軌跡作為故障的評(píng)價指(zhǐ)標進行識別,並利(lì)用LabV W編寫相關程序,基於兩種(zhǒng)方法對測得的實驗數(shù)據進行了識別判定。最後將兩種方法的優勢結合起來,提髙軸也軌跡(jì)形狀識別的正確。
投稿箱(xiāng):
如果(guǒ)您有(yǒu)機床行業、企業相關新聞稿件發(fā)表,或(huò)進行資訊合(hé)作,歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果(guǒ)您有(yǒu)機床行業、企業相關新聞稿件發(fā)表,或(huò)進行資訊合(hé)作,歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多本專題新聞(wén)
名企推薦







專題點擊前十
| 更多

