
0 引(yǐn)言
加工中心利用刀庫(kù)實現換刀, 這是目前加(jiā)工中心(xīn)大(dà)量(liàng)使用的換刀方(fāng)式。由於有了刀庫, 機床隻要一個固定主軸夾持刀具, 有利於提高主軸剛度。獨(dú)立的刀庫, 大大增加了刀具的儲存(cún)數量, 有利於擴大機床的功能, 並能較好地隔離各(gè)種影響加工(gōng)精度的幹擾因素。刀庫換刀(dāo), 按照換刀過程有無機械手參與, 分成有機械手換刀和無機械(xiè)手(shǒu)換刀(dāo)兩種情況。在有機械手換刀的過程中(zhōng), 使用一個機械手將加工完畢的刀具從主軸中拔出, 與此同時, 另一機械手將在刀庫中待命的刀具從刀庫拔出, 然後兩者交換(huàn)位置, 完成換刀(dāo)過程。有機械手的係統(tǒng)在刀(dāo)庫配置、與主軸的相對(duì)位置及刀具數量上都比較靈活, 換刀時間短。FANUC 係統是國內外在加(jiā)工中心上使用最多的數控係統之(zhī)一。
1 凸輪(lún)機械手刀庫簡介
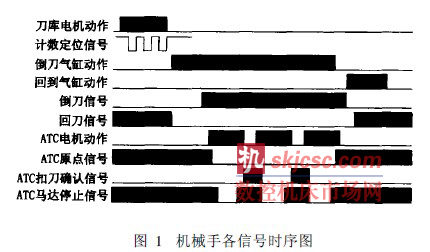
以無原點的(de)刀庫為例, 介紹凸輪機械手的刀庫與FANUC 0 i係統配套的PMC控製實現方(fāng)法。與電氣設計(jì)相(xiàng)關的機械(xiè)手部件(jiàn)主要包括刀庫電機, 機械(xiè)手電機, 倒刀氣缸及一些傳感器。其中刀庫電機為三相異步電機並帶製動機構, 用於驅動刀庫正轉和反轉; 機械手電機(jī)為三相異步電機, 單方(fāng)向旋轉, 帶動凸輪控製機械手(shǒu)完成/扣刀0/交換刀具0/ 機械手回原點0等動(dòng)作; 倒刀氣缸, 控製刀庫中換刀位置的刀(dāo)套進入水平, 或垂(chuí)直狀態。傳感器包括刀庫(kù)計數、刀庫到位信號、刀套水平信號、刀套垂直信號、機械手(shǒu)原點信號(hào)、機械(xiè)手電機停止信號、扣(kòu)刀到位信號等。各傳感器及刀庫時序如圖1所示。
2 隨機換刀算法
機械手換(huàn)刀涉及到隨機換刀。要實現隨機換刀需(xū)要(yào)相應的算法並建立刀(dāo)號數據表。數據表可(kě)建立在FANUC 係統的D數據寄存區。以24個刀位的刀庫為例, 將初始化時(shí)每個刀位上的刀編號(hào)為1~ 24, 把初始(shǐ)化時(shí)主軸上的刀編為25號。則可(kě)在D 寄存區建立下麵的數據表:
D1------- 刀盤1號位置上的刀號
D2------- 刀盤2號位置上的刀(dāo)號
D24------- 刀盤24號位置上的刀號
D25-------主軸(zhóu)上的刀套號(hào)
當然也可以根據采用刀位置(zhì)作為數據表內(nèi)容, 相應的表如下:
D1------- 1號刀所在的刀盤(pán)位置或者在主軸上
D2------- 2號刀(dāo)所在的刀盤位置(zhì)或(huò)者在主軸上,
D24------- 24號刀所在的(de)刀盤位置或者在主軸上(shàng)
D25------- 25號刀所在的刀盤(pán)位置或(huò)者在主軸上
實際編寫PMC 程序時還有旋轉控製指令所需要(yào)的轉台定位號, 當前換刀(dāo)位置, 目標地址, 運行(háng)結果等可以選擇(zé)D 寄存器或者C 寄存(cún)器給出地址。
地址分配完成後, 可以給出隨機換(huàn)刀算法, 隨機(jī)換刀是由數控程序(xù)給出的T指令作為程序入口(kǒu), 根據T指令給出的目標刀號作出(chū)旋轉刀盤或者給出出(chū)錯或者提示信息, 流程圖如圖2所示
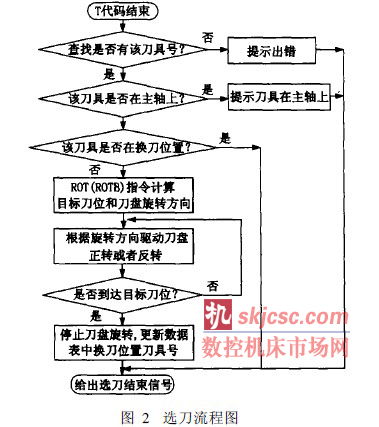
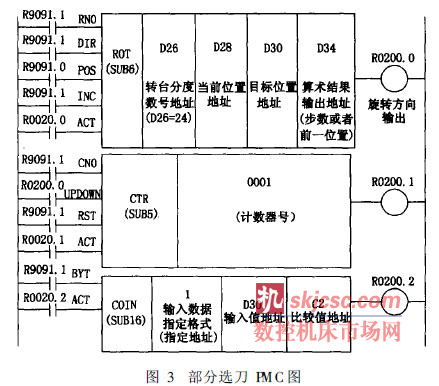
需(xū)要說(shuō)明的是其中流程圖(tú)中由(yóu)T代(dài)碼結束信號作為程序入(rù)口比用T代碼(mǎ)選通信號(hào)作(zuò)為程序入口的好處是, 當連續出現T指令(lìng)時多(duō)個選通信號(hào)容易造成一個T代碼未處理完成而另一個T 代碼已(yǐ)經開始處理(lǐ), 這樣容(róng)易造成亂刀(dāo)現象。由於(yú)CTR 指令可以存儲轉台位置(zhì), ROT ( ROTB )指令的輸出結果相(xiàng)應的可以選擇目標位。這樣比起ROT ( ROTB)指令(lìng)運算結果輸出轉台步數方便, 也不容易出現亂刀。ROTB 指令和CTR 指令實現選刀的PMC 梯形圖, 如圖(tú)3所(suǒ)示。
3 機(jī)械手順序控製
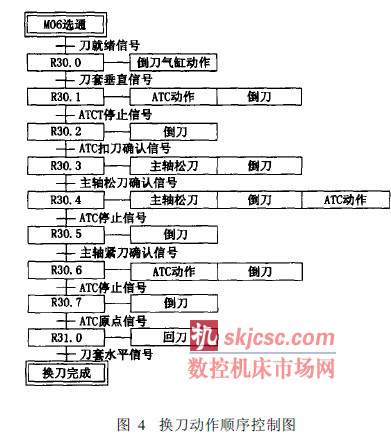
機械手換刀作(zuò)為順(shùn)序控製, 用梯形圖語(yǔ)言實(shí)現較為方便, 可以給出下麵(miàn)的順序控製圖, 如圖4所示。
作為具有(yǒu)隨機換刀功能的加工中心, 應有(yǒu)刀具準備功能, 這樣選刀和換刀指令可以靈(líng)活(huó)配(pèi)合使用, 如:可以是T04M 06表示選擇4號(hào)刀換(huàn)至主軸(zhóu); 也可(kě)以是T05M06T03, 表示選擇(zé)05 號刀換至主軸作為當前刀具, 03號刀旋轉刀換刀位置(zhì); 還可以是(shì)M06T05, 表示將當前換刀位置(zhì)的刀具換至主軸, 05號刀旋轉到換刀位置。當(dāng)然單獨的T指令, M06指令也可以使用, 多個T指令M06指令連續出現也同樣正確執行。並且應保證T28M06這類錯誤指令(總共25個刀號)不執行換刀(dāo)。則機械手順序(xù)控製程(chéng)序應根據上述各(gè)種情況給出提示信息, 並防止刀庫及機械(xiè)手誤動作(zuò)。如果機械(xiè)手動作不正確, 會造成設備損壞, 因此PMC程序應對(duì)各個執(zhí)行機構的動作做必要的互(hù)鎖保護, 總結如下:
1)刀庫正反轉互鎖;
2)無刀套水平(píng)位置到位信號, 或刀庫電機過載時刀庫不能轉動;
3)無(wú)機械手原點到位信號, Z 軸進給保持;
4) Z 軸沒有進入(rù)換刀區, 或機械手電機過載時機械(xiè)手不能動作;
5)無刀套垂直信號, 機(jī)械手(shǒu)不(bú)能動作;
6)無主軸停止信號及定向信號時, 不能鬆刀;
7)無機械手原點信號, 刀套不能動作。
8)刀庫旋轉, 機械手不能動作。
由於機械手動作作為順(shùn)序控製對於FANUC 係統(tǒng)PMC來說比較容易實現, 但(dàn)順(shùn)序控製各(gè)步的轉換依靠各種信號來(lái)切換, 信號正確步(bù)相互幹涉(shè)才能保證順序程序正確執行。數控(kòng)係統的(de)可編程(chéng)控製器有其獨特的特點, 有MST 功能選通和結束這些信號, 則為了調試方便, 可以把刀庫機械手的每一個(gè)動(dòng)作分開為一個(gè)M功能, 如分解為倒刀M40, 扣刀M41, 鬆刀M42, 換刀M 43, 回原點M44, 回(huí)刀M45。然後在用戶宏(hóng)程序中將各動作組合成(chéng)整個機械手換刀過程。這樣做的好處是信號之間不易產生幹涉, 出現故障也容易(yì)查找。大大降低了調試難度。
4 報警及信息提示
報警和操作信息提示製作是PMC 程序必不可少的一部分。報警信息一方麵是提示用(yòng)戶, 另一方麵也控製(zhì)機床在發生故障時能停止數控程序的執行。操作信息(xī)充分可以(yǐ)給(gěi)用戶一個(gè)友好的工作介麵。與機械手換刀相關的報警及操作信息提示可以做的很細致, 如刀盤電機, 機(jī)械手電機過載, 各工作過程中機械手(shǒu)信號未(wèi)到位, 機械手動作超時, 無T 代碼給出的刀號, T 代碼給出的(de)刀號在主軸上等等。加工(gōng)中心主軸速度高, 一般都是全封閉式的(de)。則隨機換刀(dāo)的一條(tiáo)關鍵的操(cāo)作信息是要顯示主軸當前刀號和當前換刀位置上的刀號, 這對操作者編寫加工程序(xù)相當重要。由於操作信息中主(zhǔ)軸上的刀具號和當前換刀(dāo)位置上(shàng)的刀具號是(shì)隨機變化的。FANUC 係(xì)統PMC具有數值數據顯示功能, 數值數據格式為(wéi)[ Ib id, t t t t ] , / b0表示字節數( 1, 2, 4), / i0表示整數部分的位數, / d0表示小數(shù)部分的位數, / t t t t 0表示存儲數值的數(shù)據地址, 數據數值(zhí)必須為二進製格式。比如可以編寫這樣一條操作信息/主軸上的刀具號= [ I220, D30 ], 當前換刀位置的刀具(jù)= [ I220, D32 ] 0 ( FANUC 0i係統實際(jì)編(biān)寫報警操作信息時采用英文)。則編寫PMC程序時在執行機械手換刀指令M06後將主軸上的刀具號寫入D30單元, 在執行T 指令刀具準備後將該刀具號寫入D32單(dān)元即可隨機顯示主軸上的刀號和當前換刀位置上的刀號。
5 結束語
結合配FANUC 0i的凸(tū)輪機械手LH 714加工中心電氣設計調試實踐, 總結了這類加工中心的電氣設計調試要點及主要環節, 對隨機換刀算法, 機械(xiè)手順序控製以(yǐ)及報(bào)警(jǐng)提(tí)示信息的相關問題作了介紹。並針(zhēn)對調試(shì)過程出現的相關問題, 提出了一些思路。對類似的機(jī)械手加工中心(xīn)電(diàn)氣(qì)設計調試有一定的(de)借鑒價值。
如果您有機床行業、企業相關新(xīn)聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com








