
0 引言
機器視覺是在圖像處理的基礎上發展起來的新興科學,基於機器視覺的測量是一種非接觸測量技術,能夠(gòu)實現測量的自動化。高精度測(cè)量的關鍵(jiàn)是攝像機測量係統的標定,在零件尺寸測量中,一般選用的(de)是短焦距定焦光學鏡頭,而短焦距光學鏡頭的(de)非線性徑向畸變是影響測量精度的主要因素,所以需要標定鏡頭的非線性畸變[1-2]。
標定後從圖像中提取(qǔ)特征點是圖像的一個(gè)重要的局部特征,它在保留了圖像中物體重要特征(zhēng)信息的同時又有效(xiào)減少了(le)信息的數據量,哈裏斯角點提取方法首先定義某(mǒu)些算子,通過在灰度(dù)圖像上尋找該算子的極值提取特征點。在(zài)文獻[3]中提到,哈裏斯角點提(tí)取方法是目前效果最好最穩定的角點(diǎn)檢測算子,它對亮度變化和剛體幾(jǐ)何變(biàn)換(huàn)有很高的重複性。
OpenCV[4-5]是一個開源的計算(suàn)機視(shì)覺庫,自1999年1月(yuè)發布Alpha版本開(kāi)始,它(tā)就在許多領域、產品和研究成(chéng)果中(zhōng)廣泛應用,包括衛星(xīng)地圖和電子地圖的拚(pīn)接、掃描圖(tú)像(xiàng)的對齊、醫學圖(tú)像去噪、製造業中的產品質量檢測係統以及攝像機標定等領域。
高精(jīng)度零(líng)件角點距離測量研究所實現的檢測(cè)算法是基於開源的(de)OpenCV。首先對攝像機進行標定,然後采用中值濾波等手段實現圖像預處理,最後(hòu)采用哈裏斯角點檢測和亞像素(sù)檢測方法獲取高精度角點位置。實驗結果表明,檢測(cè)精度高,檢測效果良好,為實際問題的解決(jué)提供了新的(de)思路。
1 攝像機標定
1.1 透鏡畸變參數
機器視覺(jiào)中所測量的一(yī)般為近景,對(duì)於要快速生成圖像的攝像機而言,必(bì)須(xū)利用大(dà)麵積且彎曲的透鏡,讓足夠多的光線(xiàn)能夠收斂聚焦(jiāo)到投影點上。透鏡可以聚焦足夠多的光線到某(mǒu)個點上,使得圖像的生成更加(jiā)迅速,其代(dài)價就是引(yǐn)入了畸變[6]。徑向畸變和切向畸變為兩種主要的畸變[1]。對於徑向畸(jī)變(biàn),成像儀某點的徑向位置按下式進(jìn)行調節
xcorrected = x(1+k1r 2 + k2r 4 + k3r 6) (1)
ycorrected = y (1+ k1r 2 + k2r 4 + k3r 6)
式中:(x,y)是畸變點(diǎn)在成像儀上的原始位置,(xcorrected, ycorrected)是校(xiào)正後的新位(wèi)置。k1和k2是徑向畸變的係數。切(qiē)向畸變是由於透鏡製造上的缺陷使得透鏡本身與圖(tú)像平麵不平行而(ér)產生(shēng)的,可以用(yòng)兩個額外參數(shù)p1和p2來描述
xcorrected = x +[2p1 y + p2(r 2 +2x 2)] (3)
ycorrected = y +[ p1(r 2 +2y 2)+2p2x] (4)
因此,k1,k2,k3和p1,p2構成了5個畸(jī)變(biàn)參數。
1.2 攝像(xiàng)機參數[5]
一個二維(wéi)平麵(miàn)上的點映射到攝像機成像儀上的映(yìng)射體(tǐ)現了平麵(miàn)的單應性,如果對點E到成像儀上的點e 的映射使用齊次坐(zuò)標,這種映射可以用矩陣相(xiàng)乘的方式表達。定義(yì)E ~ =[X Y Z 1]T ,e~ =[x y 1]T 。則可以把單應性簡(jiǎn)單表示為
e~= sH E ~(5)
參(cān)數s 是一個任意尺度比例,H由用(yòng)於(yú)定位(wèi)觀察的物體平麵的物理變換和使用攝像(xiàng)機內參數矩陣(zhèn)的投影兩部分組成。物理變換部(bù)分是與觀(guān)測到(dào)的圖(tú)像平麵(miàn)相關的部分旋(xuán)轉R和部分平移t 的影響之和。由於使用(yòng)齊次坐標,可以把R和t組(zǔ)合到一個單一(yī)矩陣中
W=[R t ] (6)
2 中值濾波
中值濾波主要實現過濾圖像中的噪聲,同時要保證圖像中接插(chā)件產品信息完整。二維中值濾波(bō)[7]取以目標像素為中心的一個(gè)子矩陣窗口,根據需要選取窗口大小,對窗(chuāng)口內(nèi)的像素灰度排序,取(qǔ)中間的一個值作為目標像素的新灰度值,其(qí)特點是較好地保護圖像邊緣(yuán)同時去除噪聲(shēng)。
中值濾波的窗口有很多形狀,如矩形、菱形、圓形、十字形等,不同(tóng)的窗口形狀有不同的濾波效果。對有緩慢且較長輪廓線(xiàn)的物(wù)體適合用矩形或圓形,對於有尖(jiān)頂角的圖像適合采用十字形(xíng),針對角點的(de)特點,需采用十字形中(zhōng)值濾波。
3 提取角點和亞像素檢測
3.1 角點提取
圖像預處理後,需提(tí)取有效的角點位置。首先定義

式中:wi,j是可(kě)以歸一(yī)化的權重比例;X = Ix (x + i,y + j ) , Y = Iy (x + i,y + j ) 。哈裏(lǐ)斯定義的角(jiǎo)點位置位於圖像二階導(dǎo)數的自相關矩陣有兩個(gè)最大特征值的(de)地方。哈裏斯最原始的(de)定義是將矩陣H(p)的行列式與(yǔ)H(p)的跡相減,再將(jiāng)差值同預先給定的閾值進行比(bǐ)較。Shi和Tomasi提出了若兩個特征值中較小(xiǎo)的一個(gè)大於最小閾值,則會得到強角點,改進(jìn)的角點方法(fǎ)可以得到比原始哈裏斯方法更好的結果[4]。
3.2 亞像素檢測
上述的(de)角點檢測隻能獲得像(xiàng)素的整數坐(zuò)標值,對於高(gāo)精度來說如果需要確定圖像中一(yī)個尖銳的峰值點位置,峰值的位置往往都不會恰好位於一個像素正中心。需(xū)要采用亞像素檢測方法,將求得的角點位置精(jīng)確到亞(yà)像素級精度。
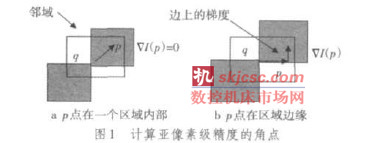
實際(jì)計算亞(yà)像(xiàng)素級的角點位置時,解的是一個點積表達式為0的方程組(如圖1的兩種情況,點(diǎn)積都為0),其(qí)中(zhōng)每(měi)一個(gè)方程都是由(yóu)q 鄰域的一個點產生。搜(sōu)索窗口(kǒu)的中心是整數坐標值(zhí)的角點,並從中心點在每個方(fāng)向上擴展指定(dìng)的像素。這些等(děng)式構成一個(gè)可用(yòng)自相關矩陣的逆來求解的線性方程組。
每(měi)找到一個q 的新位置,就需(xū)要以這個新的角點(diǎn)作為初始點進行迭代直到滿足定義的迭代(dài)終止條件。
4 OpenCV零件角點距(jù)離
測量實現(xiàn)OpenCV提供了很多攝像機標定及角點檢測方麵的(de)庫函數,以Visual Studio 2005為軟(ruǎn)件開發平台(tái),給出零件角點間距測量算法的流程框圖,如圖2所示。

讀(dú)取(qǔ)從相(xiàng)機中采集的多幅不同位置和角度的標準棋盤圖像,采用cvFindChessboardCorners( )函數對輸入的圖像進行篩選(xuǎn),選出符合(hé)標定用的(de)圖(tú)像,並用cvDrawChess⁃boardCorners( ) 函數(shù)在圖上畫出角(jiǎo)點。用cvCalibra⁃數,並保存到相應(yīng)的文檔中。調用(yòng)攝像機的內外部參數、畸變係數文檔,采用cvRemap( )函數(shù)矯正需要檢(jiǎn)測的目標(biāo)圖像。
對於矯正後的圖像,采用3×3中值濾波去除圖像噪聲。采用cvGoodFeatureToTrack( )函數尋找像素級的角點位置,確定(dìng)像素級角點位置後,實現亞像素級角(jiǎo)點位置確認,獲取亞像素角點坐標,根據采集的標準棋盤(pán)圖像,計算像素點間的實際距離值,獲取角點的距離。
5 實驗和結(jié)果分析
依據本文闡述的角點(diǎn)間距測量原理和算法,在Visu⁃al Studio 2005環境下,調用OpenCV2.0 庫函數,開發了基(jī)於MFC 對話框結構的(de)亞像素級的角點間距測量程序,程序經過嚴(yán)格測試,運行穩定,沒有出(chū)現內存(cún)泄露的情(qíng)況。操作界麵如圖3所示。
選取4×29的(de)標準棋盤為標定(dìng)目標,棋盤格子的寬度為0.1 cm。從不同的距離和角度,選取(qǔ)21幅656×492像素(sù)的圖像作為標定用圖。標定得(dé)到的內參數矩陣、鏡頭畸變係數如表1所示。
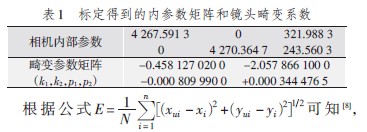
(xui,yui )為(wéi)用圖像處理(lǐ)得到的標定(dìng)點像素坐(zuò)標經過一係列變換得到(dào)的圖像物理坐標的理想坐標,(xi,yi )為世界坐標的點經過投影得到的理(lǐ)想狀況下圖像物理坐標係下的坐標。
選取合適的零件圖像,實現圖像矯正、圖像預處理、亞像素級角點檢測、角點間距測量(liàng)。如圖4所示,選取角點(diǎn)的實際距離為1.4 cm的零件。
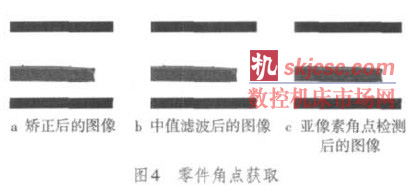
如(rú)圖4c,獲取(qǔ)零件角點(diǎn)坐標分別為(wéi)(63.883 3,253.943 4)和(299.334 7,258.910 6),根據相機拍攝的標定板圖像可得(dé)每33.6個像素為0.2 cm,由此可得(dé)零件角點距離(lí)為1.401 808 cm,偏差為0.001 808 cm。
6 小(xiǎo)結
通過實(shí)驗和檢測(cè)結果的(de)分析比(bǐ)較,這(zhè)種基於OpenCV的(de)高精度零件角點間距測量方(fāng)法有效地提高了(le)測量精度,在OpenCV中采用該角點檢(jiǎn)測方法而編寫的檢測程序具有運算效率高、標定結(jié)果精度高、角(jiǎo)點(diǎn)定位精度高、跨平台移植性好等特性,可以有效地應用於其(qí)他計算機視覺係(xì)統中。
如果您(nín)有機床行業、企(qǐ)業相(xiàng)關新聞稿(gǎo)件發表,或進(jìn)行資訊合作,歡迎聯係本網編輯部, 郵(yóu)箱:skjcsc@vip.sina.com








