
0 引言
磁懸浮軸(zhóu)承(簡稱(chēng)磁軸承)按照磁(cí)力(lì)提供方式(shì),分為主動磁軸承、被動型磁軸承(chéng)和混合型磁軸承(永磁偏置)三種。混合磁軸承用永久磁鐵產生的磁場取代主動(dòng)磁軸承中電磁鐵產生的靜態偏置磁場,能大大降低(dī)功率放大器的功(gōng)耗,使電(diàn)磁鐵(tiě)的安匝數減(jiǎn)少,縮小磁軸承體積,提高軸承承載能力,因(yīn)此,永磁偏置混合磁軸承是磁(cí)軸承領域的(de)一個(gè)重要研究方向[1~5]。磁軸承係統中轉子(zǐ)要實(shí)現懸浮,需要(yào)在5個自由度上施加控製力,因此,典型的係統都采用三個磁軸承來支承,其中兩個徑向磁軸承控製徑向相互垂(chuí)直的兩個方向,另一個軸向推力磁軸承控(kòng)製軸向自由度。本文(wén)研究一個軸向磁軸承(chéng)和一個徑向磁軸(zhóu)承組成的三自由度混合磁懸浮軸承,並且采(cǎi)用永磁體作(zuò)為軸向-徑向磁軸承的靜態偏置磁場。
磁軸承的動態性能(剛度、阻尼及穩定(dìng)性等) 的好壞取決於所用控製器的控製規律,可以通過采用性能優良的控製器使磁軸承的動態剛度、阻尼與其工作環境,甚至與運行環境相適應。采用模擬控製器實現先進的控製算法(fǎ)比較困(kùn)難,甚至是不可能的,且模(mó)擬控製器存在體(tǐ)積大、功(gōng)耗(hào)大等缺點。基於提高磁軸承性能、可靠性、增加控製器的柔性、減小體積等方麵(miàn)考慮(lǜ),本文在采(cǎi)用模擬控製器實現永磁偏置徑(jìng)向)軸向三(sān)自(zì)由度混合磁軸承的基礎上,采用TI公司的TMS320LF2407 DSP作為控(kòng)製係統的(de)CPU,充分發(fā)揮數字信(xìn)號處理器硬(yìng)件(jiàn)和軟件編程的優勢,采用改進PID算法,研製了三自由度混合磁軸承數字控(kòng)製係統,滿足了(le)磁軸承控製(zhì)性能的要求。
1 混合磁軸承結構及懸浮力產生機理
1.1徑向-軸向三自由度混合磁軸承結構
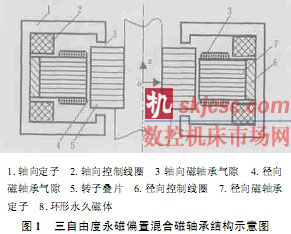
徑向-軸向三自由度永磁偏(piān)置混合(hé)磁軸承基本(běn)結構見圖1和圖2,它們由軸向定子、軸向控製線圈和徑向定子、徑向控製線圈、環形永(yǒng)久磁鐵等構成。工作時軸向兩個線圈和徑向(xiàng)對置的兩個線圈串聯作為相關自由度的控製線圈。當徑向-軸(zhóu)向都(dōu)穩定(dìng)懸浮時,轉子在永久磁鐵產生的靜磁場吸力下磁體處於(yú)懸(xuán)浮的中間位置,徑(jìng)向和軸向單(dān)邊氣隙都(dōu)為(wéi)015mm。由於結構(gòu)的對(duì)稱性,永(yǒng)久磁鐵產生的磁通(tōng)密度在轉子上(shàng)下(xià)、左右和前後的氣(qì)隙處是相等的,設計時取014T。

1.2徑向-軸向磁軸承工作原理
徑向和軸向混合磁軸承在三個自由度上的工作原理是一樣的。圖3是軸向磁軸承(chéng)的工作原理圖,當軸向穩定懸浮在參考位置(zhì)(中間位置)時,由於結構的對稱性,永久(jiǔ)磁鐵(tiě)產生的磁通在轉子左右(yòu)麵吸(xī)力相等。如果在此平衡位置時轉子(zǐ)受到一個向右的外擾力,轉子(zǐ)就會偏離參考(kǎo)位置(zhì)向右運(yùn)動,造成永久(jiǔ)磁鐵產生的左右氣隙的磁(cí)通變化(假(jiǎ)設徑向在平衡位置),即左(zuǒ)麵的氣隙增大,使永磁體(tǐ)產生的磁通ФPMz2減(jiǎn)小,右麵的氣隙減小,使永磁體產生的磁通ФPMz1增加(jiā)。
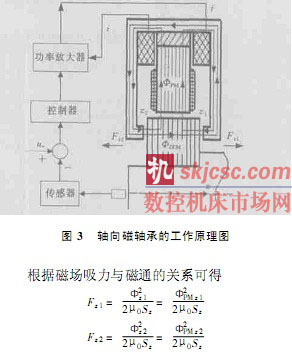
式中,Fz1、Fz2分別為吸力(lì)盤左右麵受到的電磁吸力;z1、z2分別為(wéi)左右氣隙處(chù)產生的合成磁通;Sz為軸(zhóu)向磁極的麵積;u0為(wéi)空氣的磁導率。
在未產生(shēng)控(kòng)製磁通(tōng)ZEM之前,由於PMz2<PMz1,故Fz2<Fz1。由(yóu)於外擾力(lì)使轉子向右運動,此時傳感器檢測出轉子偏離其參考位(wèi)置的(de)位移量,控製器將這一位移信號轉變成控製信號,功率(lǜ)放(fàng)大器又(yòu)將此控製信號變換成控製電流i,這個電流通過電磁鐵線圈,在鐵芯內產生(shēng)電磁磁通ZEM,使(shǐ)氣隙z2處總的磁通增加,即5z2=5PMz2+ZEM;在右麵氣(qì)隙z1處使氣隙z1處的總磁通減小為5z1=5PMz1-ZEM。電磁磁通的變化,使得Fz2\Fz1,轉子(zǐ)重新回到原來的(de)平(píng)衡(héng)位(wèi)置。如果(guǒ)轉子受到一個向(xiàng)左的外擾力(lì),可以用類似的方法(fǎ)進行(háng)分析,得到類似的結論。因此,不論轉子(zǐ)受(shòu)到向右或向左的外擾動,帶位置負反饋的永磁(cí)偏置軸向磁軸承(chéng)係(xì)統,其轉子通過控製器控(kòng)製勵磁繞組中的電流,調節左右氣隙磁通的大小,始終能保(bǎo)持轉子在平衡位置。
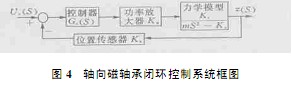
功率放大器采用電壓)電流(liú)功率放大器,近似為(wéi)比例環節Ka,位置傳感器采用(yòng)電渦流傳感(gǎn)器,其傳遞函數可近似認為(wéi)比例環節Ks,控製器(qì)傳遞函數為Gc(S),被控對象的力學模型為Ki/(mS2-Kz),其中,Ki是z方向的力/電流係數,Kz是z方向力(lì)/位移(yí)係數,控製係統框圖見圖4。
2 數(shù)字(zì)控製係(xì)統硬件構成
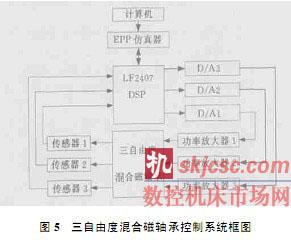
數字控製係統硬件由PC機、EPP仿真器、TDS2407EA評估(gū)板構成。TDS2407EA評估板由TMS320LF2407定點DSP數字信(xìn)號處理器、零等(děng)待狀態的128K外部擴展SRAM、DAC7625四通道D/A轉換器(qì)和(hé)JTAG仿真接口等構(gòu)成,並且帶(dài)有4路12位(wèi)DAC7625D/A轉換器,轉換時間為10Ls。控製(zhì)係統結構框圖見圖5。
3 數字控製(zhì)係統(tǒng)軟件(jiàn)構成
3.1控製策略選取
控製器是磁(cí)軸(zhóu)承係(xì)統中的關(guān)鍵技術之一,其性能的好壞直接影響到磁軸承能否穩定工作。國內外對控製策略進行了大量研究,如最優控製方法、智能(néng)控製方法(fǎ)和魯(lǔ)棒控製方法(fǎ)等。從(cóng)基本滿足磁軸承性能的(de)要求來考慮(lǜ),本文以典型PID控(kòng)製器為基礎,采用乒乓-PID複式控製、串一個慣性環節和分(fèn)段PID控(kòng)製參數(shù)選取等方法,通過軟(ruǎn)件編程來解決傳(chuán)統積分(fèn)飽和(hé)和PID微分突變兩個弊端,針對不同轉速範圍,自動選取PID控(kòng)製(zhì)參數(shù),確保控(kòng)製器性能滿足磁軸承的剛度、阻尼(ní)、穩定性和(hé)轉子的回轉(zhuǎn)精度的要求(qiú)。經對三自由度混(hún)合磁軸承係統的理論分析和模擬控(kòng)製器的研究[5]可(kě)知,在平衡位置附近,其三自由(yóu)度之間的耦合比較小,故本(běn)文采用三自由度(dù)分散控製PID數字控製方法進行控(kòng)製,其傳遞函數結構框圖見圖6。具體采用如下帶積分分離的不完全微(wēi)分PID控製算法的數學公式:
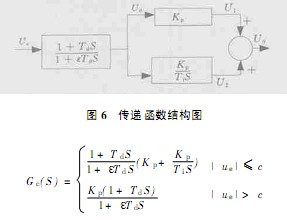
式中,Kp為放大係數;Ti為積分(fèn)時間(jiān)常數;Td為微分時間常數;ε為微分增益;ue為輸入靜差;c為設定閾值。
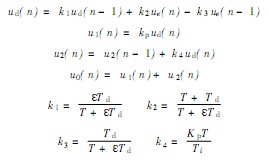
由(yóu)於控製器Gc(S)用DSP來(lái)實現,必須化成(chéng)離散控製算法,按圖6中微分先行的流程,用微分)差(chà)分映(yìng)射(shè)設(shè)計(jì)法,求得采樣周期為(wéi)T時,第n個采樣時刻各輸出量如下:
3.2匯(huì)編語言程序設計
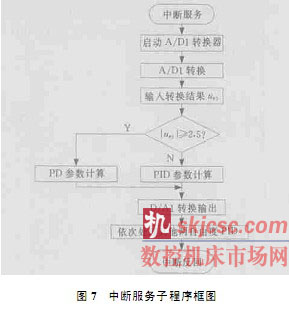
根據(jù)采樣(yàng)定理來考慮係統采樣周期(qī),針對轉子8@104r/min轉速設計數字控製器,采樣周期T選為80Ls,滿足香農定理。DSP采用內部定時器T1產生周期中斷,T1采用連續遞減計數,設定時間常數為(wéi)十進製數2400。控製軟件由主程序和中斷(duàn)服務子程序組成。主程序完成有關寄存器(qì)、中斷設定等初始化(huà)程序工(gōng)作(zuò),打開定時器T1並執行循環等待(dài)程(chéng)序,等待(dài)中斷事件發生(shēng)。中斷事件發生時DSP響應中斷事件,中斷子程序(xù)執行完畢後,程序繼續進入循環等待狀態。T1周期中(zhōng)斷時調用中(zhōng)斷服務(wù)子程序,中斷處理程序完成三個自由度獨(dú)立的PID控製算法參數的采樣輸入、運算及D/A轉換輸出過程。采樣和輸出有多種方案,如:¹三路A/D同時采樣,運算完成後,三路D/A同時(shí)輸出;º徑向兩個自由度同時采樣,運算和輸出後,再處理軸向單(dān)自由度的采樣、運算和輸(shū)出;»單路(lù)分別流水作(zuò)業(yè)。具體采用何種形式,主要取(qǔ)決於所采用的硬件條件,本文采(cǎi)用流水作(zuò)業的方法。控製軟件子程序框圖見(jiàn)圖7。
4 實(shí)驗結果
實驗用三自由度(dù)混合磁軸(zhóu)承(chéng)參數如下:軸向定子磁極端麵內徑32mm,外徑39mm,Sz=390mm2,Fzmax=100N;徑向定子磁極端麵內徑50mm,定子長度(dù)10mm,外徑123mm,Sxy=19613mm2,Fxmax=Fymax=50N;環型永磁(cí)體徑向厚度311mm,內徑(jìng)123mm;各線圈最大安匝數160安匝,采用標稱直徑0163mm的(de)漆包線各160匝,轉子質量2kg,位移傳感(gǎn)器采用的靈(líng)敏度(dù)為20mV/um,其放大(dà)倍數為(wéi)2*10的4次方。
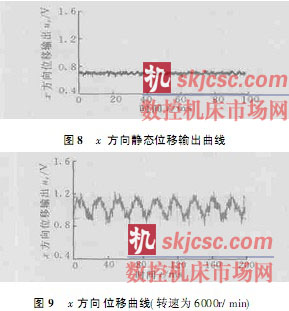
實驗前首(shǒu)先采用MATLAB語言對三自由度磁軸承(chéng)控製係統進行數字仿真,參(cān)見文獻[5]的研究方法,初步找出其PID控製參(cān)數範圍(wéi),在本係統中(zhōng)KpU8,TiU0102s,TdU010006s,E=0101,c=215。實驗(yàn)時隻需要對各自由度(dù)參數通過微調比例係(xì)數和微分(fèn)係數,使(shǐ)係統獲得滿意的響應曲線(xiàn)後,調節積分時間常數,在保持係(xì)統響應良好的情況下,使輸入靜差得到消除。部分實驗結果見圖8和圖9。圖8為x方向磁軸承靜態位移輸出曲線,圖9表示轉子以6000r/min的速度運行時,x方向(xiàng)轉子振動的電壓波形,其電壓峰值近似400mV,此方向轉子振動峰值約(yuē)為20um。
實驗表明采用以TMS320LF2407為CPU設計的磁軸承控製係(xì)統能夠(gòu)滿足磁軸承係統的控製要求,而且易於實現(xiàn)各種(zhǒng)先(xiān)進的控製策(cè)略,研製的三自由度混合磁軸承(chéng)已經應用於無軸承開關磁阻電動機實驗樣機(jī)中。
如果您有機床行業、企業(yè)相關(guān)新聞稿件發(fā)表,或進行資訊合作,歡迎聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com








