控")



基於數(shù)控流水線技術的開放式數控係統研究
2018-3-14 來(lái)源:昆明冶金高等專科學校機械工程學院 作者:鄧宇翔
【關鍵(jiàn)詞】數控係統 數控(kòng)流水線
【摘要】為了使數(shù)控流水(shuǐ)線技術(shù)的開放式數控係統設計不依(yī)附於特定的硬件和軟件平台,因此設計了一種通過數控主控流水線線程以及驅動程(chéng)序和數控微代碼實時執行單元組成的數控流水線係統。
這種數控係統定義(yì)了開放的數控微代碼數據接口與開放的數控規範指(zhǐ)令程序,一方麵確保了數控模塊的交互性,另一方(fāng)麵也使數控流水線的重構成為可能。數控流水線線程封裝了從數據指令譯碼到生成數控微(wēi)代碼的主要控製,進一步使用現代軟件開發技術與標準編程(chéng)接口保證數控代碼的(de)可移植性。通過可重(chóng)構的開放式硬件(jiàn)對數控微(wēi)代碼的實時執行模塊進行實時操控,由緩衝區隔離了數控(kòng)流水線的非實時部分和實(shí)時部分。
開放式數控微代碼 可重構數控流水線(xiàn)技術的開放式數控(kòng)係統通過計算機操作係統進行程序構建(jiàn)。即使主流型的(de)計算機操控係統可以更加便捷地實現信息的存儲(chǔ)管理、人機交互功能以及網絡通訊功能,但是難以(yǐ)實現(xiàn)數控係統中的強實時功能l[]。因為,在通常情況下,通用的(de)計算機操作係統隻是立(lì)足於整體運算性能的優化而影響了實時響應功能的正常發揮。
1、數(shù)控(kòng)係統的流水(shuǐ)線處理技術
為了使數控操作係統(tǒng)中的強實時功能的發揮成為可能,可以通過兩種不同的操作方案來對其實時功能進行優化(huà),一(yī)種方案就是著眼於實時(shí)數控操作(zuò)係統進行優(yōu)化的軟件數控係統(tǒng),通過不同優先級的任務劃分,RTOS基於不同的優先(xiān)級進行任務快速調度,從而有效確保了較高優先級任務能夠實時響(xiǎng)應。最(zuì)直接的案例就(jiù)是NIST[2]美國國家標(biāo)準(zhǔn)和技術研究所主持的增強型運動控製器EMC程序,這種操作項目是通過iLn二計算機操控係統實時建立的基於數控流水線技術的開放式數控係統。但這種數(shù)控操作係統也存在一定的技術缺陷,由於該係統的(de)內核在臨界區執行織孔命令時無(wú)法響應實時(shí)的操作程序事件,因此就會導致數據實(shí)時響應具有很大的不確定性;另一方麵,數(shù)據操控以及計算機(jī)係統任務切換會消耗數控係統(tǒng)本身(shēn)的額(é)外(wài)資源,所以數控操作係統(tǒng)在這(zhè)種高負荷的實時運行環境下就會影(yǐng)響數控係統的整體性能發(fā)揮。
在日常實踐中,技術人員通過對iLnux實時計算機操作係統進行數據運行測(cè)試,由於該係統的外部中斷頻率為83.15kHz,所以外部中斷頻率就會影響該係(xì)統(tǒng)的實時響應,在數控操作係統中就會形成巨大的誤差,所以這種誤差在實際的數控係統運行過程中是不允許出現的。當前(qián)信息化技(jì)術時代,數控係統中電機的脈衝頻率可以高達IMHz,在Real一Timeopearti雌system操控係統下,如果以單一的軟件操控管(guǎn)理電機中(zhōng)的(de)脈衝頻率很難達到IMHz以上。究其原因(yīn),當(dāng)前的Rael一iTmeopearitgnSystem操控係統還缺乏一套(tào)標準(zhǔn)的編程(chéng)方案,用戶需要掌握專業的編(biān)程技術和數控(kòng)操作係統的(de)任務調(diào)度機製(zhì)才能對計算機(jī)軟件進(jìn)行開發,這樣不但不利於數控操作係統的實時開放,同時也增加了計算機軟件的技術開發難度。
此外,另一種(zhǒng)方案就是通過把所有強實時(shí)功能的操作(zuò)係統集成到一(yī)種專用的運動控製器上麵,形成多CPU操作係統的數控結構,這(zhè)種係統結構要以高性能的cPu為核心,例如DsP數字信號處理器。例如,DeltaaTu公司采用(yòng)的PMAC可編(biān)程多軸運動(dòng)控製(zhì)器就是一種基於DSP的運(yùn)動控製卡設備,此時用戶可以通過人機交互、網絡通信、軌跡規劃以及圖形仿(fǎng)真等功能在上位機內進行相應功能的應用開(kāi)發。但需(xū)要注意的是,如果用戶(hù)開發的是(shì)PMAC[3]可編程的多軸運動控製(zhì)器的內部算法,此時(shí)用戶需要采用專門的數(shù)據語言(yán)來進行編程,這種操控方案無疑增加了數控係統的開發難度,同時也大(dà)大降低了係統的開放性(xìng)。此外,這種程序設計還需要通過高性能的專用CPU來進行程序開發,增(zēng)加了用(yòng)戶係統開發的(de)技術成本(běn)和(hé)經濟成本,更大的弊端是浪(làng)費(fèi)了(le)上位機CPU內部的潛在數據運算資源。
從上麵的論述(shù)中可以看出(chū),前後兩種的不同操作方案都各有利弊(bì),因此本文(wén)結(jié)合上述分析設計了一種全(quán)新的基於數控流水線技術的開放式數控(kòng)結(jié)構,這種開放式數控結構通過對係(xì)統硬件和(hé)軟件性(xìng)能的綜合平衡,發揮了當前微電子計算機時代通用數據平台的計(jì)算優勢,從而大大優化了流(liú)水線開放式數控係(xì)統的整體性能(néng)。這種基於數控流水(shuǐ)線(xiàn)技術的開放式數控結構的(de)設計理念就(jiù)是盡可能通過采用先進(jìn)的計算(suàn)機(jī)開發技術來降低用戶(hù)的程序開發難度(dù)。通過實(shí)踐表明,基於數控流水線技(jì)術的開放式數控結構具有十分廣泛的(de)應用性,它可(kě)以支(zhī)持當前所有主流的操作係統的軟件和硬件技術平台的數據操作。
2、當前我國(guó)數控(kòng)係(xì)統的(de)流水線開放式數控係統處理技術
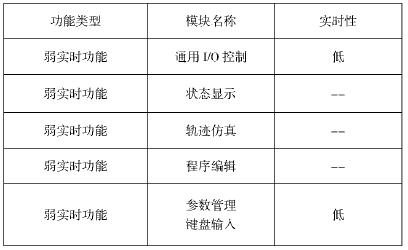
通常的數控係統內部功能可以分為常見的兩種類(lèi)型,一種是基於數控係統(tǒng)內部功(gōng)能的弱實時功能,另一種是(shì)基於數控技術內部功能的強(qiáng)實時功能。如下表所示,數控(kòng)係統功(gōng)能的重要(yào)核心基礎就是數控內部(bù)的(de)強(qiáng)實時功能,它們與數控機床的加工過(guò)程緊密相關,因此對數控操作係統的實時性功能有很高的技術要求,不能出現任何的加工技術失誤。此外,從下表(biǎo)中可以看出,每一個強實時模塊對於數控操作(zuò)係統的實時性要求(qiú)是有所差(chà)別的。同(tóng)強實時功能(néng)不同,數控操作係統的(de)弱實時功能主要是通過對程序信息進行管理和人機交互、機床低速的通用1/0等幾種不同的職能對數控操作係統的實時性要求相(xiàng)對(duì)較低。如果由於操(cāo)作技術失誤或者信息延遲導致有關的程序運行未能夠有效及時(shí)進行指(zhǐ)令,一般(bān)情(qíng)況下也不(bú)會影響到具體的數控加(jiā)工過程。所以這些弱實時功能(néng)可以通過當前的的用戶操作係統就可以便捷實現。
表1數控係統主要不同任務的優先級
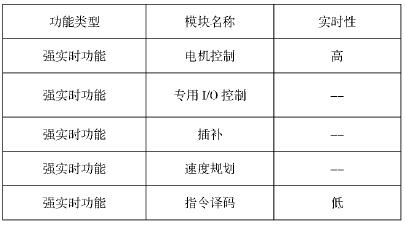
表2數控(kòng)係統主要不同任務的優先級
通過對數控操作係統中的強實(shí)時功能進一步分析可以發現,數控係統的的強實時功能具有自身的某些技術特征,各個強實時功(gōng)能之間存在一種“後向驅動關係”,所謂的後驅動功能是指後一級的較強實時功能驅動著前(qián)一(yī)階段的較強實時(shí)功能的(de)係統運行,通過雙方的後驅動關係來為用戶操作程序提(tí)供實時數據,驅動功能使數控操作係統中的(de)某些強實時功能串聯成(chéng)為可能,通過雙方的後向驅動關係為(wéi)數(shù)控操(cāo)作係統的穩定運行(háng)提供良好的運行基礎。除此之外,數控操作係統中的急停(tíng)、限位等(děng)一些1/0專用功能需要對其操(cāo)作數據進行實(shí)時的反饋,但大部分操控功能對下一級功能的開環控製則不需要對其進行迅(xùn)速反饋。所以(yǐ)針(zhēn)對此類應(yīng)用控製程序可以將數控操作係統中的(de)強(qiáng)實時功能預先展開批量的(de)數據運行技術處理。
實際上,數控(kòng)係統中的某些強實時功能實施(shī)性的強弱與數控係統運(yùn)行(háng)程序的算法(fǎ)複雜程(chéng)度呈反比例關係,與數控係統運行程序算法(fǎ)的數據運(yùn)行能力以及算法的調用頻率變化情況呈正比關係。這種算法功能采用(yòng)簡單的擴展硬件方法保證了部分軟件強實時任務操作(zuò)執行的便(biàn)捷性,而且算法簡便、數(shù)控程序(xù)運(yùn)行數據吞吐量大、且調運頻率(lǜ)很高(gāo)。不同(tóng)的功能之間可以對機床的具體位置和數控程序(xù)的模塊信息進行數據監測,使用戶可以對數控係統加工程序進行實時監控,但唯一(yī)的(de)不足就是數控程序(xù)操作信息更新速度相對(duì)較慢。
3、數控流水(shuǐ)線技術的開放式數控係統結構
基於數控(kòng)係(xì)統用戶信息更新(xīn)速度較慢的原因考慮,該研究主要針對上述問題(tí)通(tōng)過提供一種(zhǒng)數控流水線技術的開放式數控係統結構來對此(cǐ)類問題采取相關(guān)方案進行解決。通常的數(shù)控流水線結構困ciPpehne)主要包括(kuò)了(le)數控微代碼執行單元、數控(kòng)主控流水線線程(chéng)和(hé)數控(kòng)控製驅動層三大(dà)重要的組成(chéng)部分,具體結構如下文論述,僅供(gòng)參考:
3.1數控主控流水線線(xiàn)程
數控流水線線程5[]是一個獨立的運行線(xiàn)程,它可以通過計算機內部操作係統中的計算機(jī)數字控製(zhì)裝置cNc(computerNumiercalContorl)軟件來充分發揮(huī)通用計算機的程(chéng)序運算優勢,並將詳細的運算指令按照後向驅動關係設計成一種獨立的任(rèn)務或(huò)線程,這(zhè)種設計方法的依(yī)據是通過(guò)計算機指(zhǐ)令的多軸插補功能和計算機指令操控譯碼等一些(xiē)具體的功能來實現。這種(zhǒng)設計方法減少了計算機功能(néng)切換時的重啟頻率,所以有效提高了整個(gè)數控操作係統的整體效率。在日常的數(shù)控流(liú)水(shuǐ)線(xiàn)程中主(zhǔ)要分為機床動作(zuò)規劃(huá)和數控指令兩部分,因此使(shǐ)數控係統內部的邏輯算法和控製算(suàn)法實現了指(zhǐ)令切換。
3.2指令轉換部分
數控操(cāo)作係統的指令轉換(huàn)功能主要(yào)是通過用戶(hù)的編程(chéng)指(zhǐ)令轉化成(chéng)NCCC指令(lìng)。NumeircalControlCanonicalCommand指令是一種與CNC的控製算法以及用戶數據編程語言(yán)毫無關(guān)聯的(de)標準化應用程序數據接口端,它的主要功能就是保(bǎo)證(zhèng)CNC指令與Nccc指令兩(liǎng)者之間不能直接進行禍合,也保證了數據結構與算法之間相(xiàng)分離。在所有的操作(zuò)運算模塊中,數據(jù)指令譯碼是數控操作係統中指令(lìng)轉化的(de)重要部分(fèn),用戶隻要輸人各種加(jiā)工的源程序數據代碼,數控操作係統就可以通過相應的指令規則經過語法分析(xī),生成具(jù)體的加工策略,再經過刀具補償和坐標轉化管理,最後就可以執行NCCC指令,並將種處理後的計算機指(zhǐ)令傳輸到數(shù)控流水線的下一級程序。
3.3機床動作規劃部分
數控係統機床動作規劃部分的主要生成指令是通過不同操作係統間的程(chéng)序(xù)控製來生成數控操作機床的具(jù)體(tǐ)位置和NCCC指令,再經過(guò)程序運算,根據(jù)機床(chuáng)數控生成的新的數控(kòng)NCM微代碼。NCM微(wēi)代碼是一種(zhǒng)標準化的描(miáo)述(shù)指令集(jí),主要(yào)用於NcMP指令執行,NcM微代碼(mǎ)與機床(chuáng)動(dòng)作規劃和微代碼執行單元開放標準無(wú)關。機床動作規(guī)劃部分主要包(bāo)括了數控專用1/0控製(zhì)裝置和數控係統指令規範緩衝單元、數控指令控製單元與雜項控製部分。緩衝區主要用來緩衝不(bú)同(tóng)規則(zé)的NCCC指令;速度(dù)規劃部分主要通過(guò)參數控製裝置對緩衝區緩(huǎn)衝數據的運動參數和運(yùn)動路徑規(guī)劃,並根據具體的規(guī)劃內容(róng),依照算法規劃出一條速度曲線,之後可以通(tōng)過多插補程序速度曲線生成軸插補數據;專用1/0數控裝置可(kě)以將數控程序中的NCCC指令經過算法運算再(zài)生成相應的運算代碼。
3.4控製驅動層
控製驅動層是(shì)數控係(xì)統中的唯一運動程序(xù)模塊,在現代化的信息操作係統中,數控驅動程(chéng)序屬於內核部分,與用戶操作程序相比(bǐ),具(jù)有很高的操作運算(suàn)特權(quán),還可以直接通過數控硬件係統對計算機硬件進行數據訪問。在數控流水線控製程序中,數控驅動程序十分簡單,易於用戶操作(zuò),可以在不同的運算係統中進行切換,一(yī)方麵可以減少數控係統中的(de)程序數據運算量,另一方麵也可以提高(gāo)數控操作係統的開放程度。
4、結(jié)語
綜上所述,與一般的數控開放(fàng)式係統方案比較,基於數控流水(shuǐ)線(xiàn)技術的開放式數控係統可以降低特定的數控硬件或(huò)軟件操作環境(jìng)要求,因此可以提高數控技術的操作性,也能使數控技術廣泛適應於各種結構體係。基(jī)於數控(kòng)流水線技術的開放式數(shù)控係統流水線線程不需要實時計算機操作係統的支持就可以通過算法規則進行內部的數據運算。這種數據運算程序隻需要通過數據編程就可以構建具體的(de)運算程序(xù),因此充分展示了通(tōng)用計算機操作係統的(de)運算特點。除此(cǐ)之外,使(shǐ)開放的標準化接口與不同流水線模塊之間的頻繁切(qiē)換成為現實。NCMP指令(lìng)通過簡單化的結構(gòu)設計和運算操作,采用了低成本的設計(jì)方法,使操作運(yùn)算係統的數據(jù)傳輸更加可靠、實時、安全、便(biàn)捷。因此,NCM微代碼的數據執行由計算機硬(yìng)件(jiàn)邏輯(jí)指(zhǐ)令操作,這種代碼的控製邏輯具有較強的開放(fàng)性和實(shí)時性,而且數據邏輯可以重(chóng)構。最後的研究表明,該論(lùn)述基於數控流水線技術的開放式數(shù)控係統研究中提出的數控係統方案是具有理論技術(shù)依據的(de),並且數控流水線占(zhàn)用的實際(jì)資源較少,為數(shù)控操作係統今後的進一步(bù)拓展留有(yǒu)一定的空間。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或(huò)進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或(huò)進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界(jiè)視點
| 更多
牌調查")
行業數據
| 更多(duō)
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸(zhóu)承出口情況(kuàng)
- 2024年11月 基(jī)本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新(xīn)能源汽車(chē)產量數(shù)據
- 2024年10月 軸(zhóu)承出口情況
- 2024年10月 分地區金屬切削(xuē)機床產量數據
- 2024年10月 金(jīn)屬切削機床產量數據
- 2024年9月 新能源汽車銷量(liàng)情(qíng)況
- 2024年8月 新能源汽車產(chǎn)量數據
- 2028年8月 基本型乘(chéng)用車(轎車)產量數據