


摘要:本文是對五軸數控刀片周邊磨床的調試工作的一個小結,通過對機械手(shǒu)附(fù)加第五軸的(de)各偏移參數的測量方法的描述,對機械手從料盤中自(zì)動獲取刀片的程序流程的簡要說明(míng),進一步(bù)說明了C C D攝像頭在實際(jì)中的巧妙應用。將複雜問題進一步的(de)簡單化,解決現場(chǎng)不易解決的問題,為機(jī)床的其他調試和試切試驗贏得了寶貴的時間(jiān)。
在五軸數(shù)控刀片磨床上, 為了從料(liào)盤中取(qǔ)出刀片,並準確裝夾到數控機床上進行磨削加工;另外將機床上已(yǐ)經加工好的刀片完整地放回到料盤的原始位置,采用了三菱R H - 1 2 S D H8535四軸水平關節式機器人(機械手),附加第五軸驅動氣爪及吸盤來進(jìn)行刀片(piàn)的(de)自動上、下料過程的傳(chuán)送工(gōng)作。由於小刀片在料盤中(zhōng)的放置是隨機的,因此在用機(jī)械手從料盤中取刀片的過(guò)程中(zhōng),需要準確知道刀片在料盤中的放置位置和角度。為了解決這個問題,采用了邦納C C D攝像頭來完成。三菱機械手控製器,邦納C C D和數控機床(采用Fa g o r8070數控係統)通過一(yī)個(gè)路由器組成一個局域控製網絡,以機械手控製器作(zuò)為服務器,其他作為(wéi)客戶(hù)機來完成各種數據的(de)交換。
1. 局域網絡的連(lián)接(jiē)和通(tōng)訊設定
(1)局域網(wǎng)絡的連接:該局域網絡采用了(le)路由器掛接三菱(líng)機械手控製(zhì)器、邦納C C D相機(jī)控製器、發格(Fagor)數控(kòng)係(xì)統,甚至也可以連接多台觸摸屏和多台電腦共同組成。連接示意圖如(rú)圖(tú)1所示。
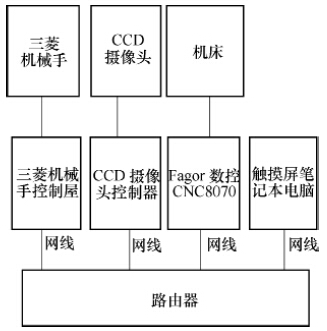
圖1 局域(yù)網絡的連接
(2)通信地址的設定:設(shè)定各控製(zhì)器的網絡IP地址(見表1)。
2. 第五軸的結構
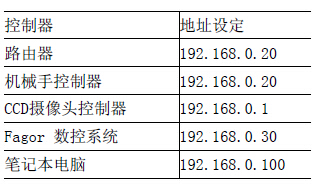
三菱機械手上附加第五軸由C C D相機、兩個爪(氣爪)、一個電磁吸(xī)盤、內裝鬆(sōng)下伺(sì)服電動(dòng)機及箱體組成(見圖2)。附加第五軸(附加軸L1軸(zhóu))通過聯軸器和三菱機械手的第四軸Z/C軸連接(Z軸(zhóu)相機上下(xià)、C軸相(xiàng)機旋轉(zhuǎn))。伺服電動機內裝(zhuāng)絕對值編碼器,控製爪1、爪2及電磁吸盤的(de)旋(xuán)轉,由機械手控製器內程序控製,可編程。設置為旋轉-90°、0°、90°。在 CCD照相之時,電磁吸盤旋轉到向下的位置,保證相機不被阻擋,並能對料盤上的刀片取得清晰的影像,便(biàn)於對影像進行數字化處(chù)理(lǐ) 。
圖(tú)2 第(dì)五軸的結構
1.氣爪爪2 2.氣爪(zhǎo)爪1 3.CCD相機4.第(dì)四軸C軸 5.聯軸器6.第五軸箱體(內裝伺服電動機)7.電磁吸盤
3. 用CCD相機的照相數字化(huà)
結果來校正CCD相機(jī)的安裝角(jiǎo)度實際上就是要調整好C C D的坐標係和(hé)機械手坐標係之間的關係。具體(tǐ)的調整步驟如(rú)下:
(1)將第五軸大概調整,使得照相機坐標(biāo)係和機械手坐標係在感覺上差不(bú)多(duō)平行(相機位置粗調)。
(2)在機械手下方的料盤上放置一個標準量塊,長度300m m。再在機械手的第五軸上固(gù)定一個百分表,移動機械手的Y軸,移動長度盡可能的接近標準量塊的長度;首先從左向右移動,在移(yí)動的過程中根據百分表指示,微量調整量(liàng)塊的位置;通過機械手多次往複的移動和微量調整量塊位(wèi)置,使得達到標準量塊麵和(hé)機械(xiè)手坐標係平行度在0.02/300 m m之內。注意,現在量塊的位置很重要,不得觸動和碰撞、移(yí)動。
(3)用安裝在第五軸上的邦納C C D攝像頭對著標準量塊照相。打開電腦(nǎo)上安裝的C C D 專用軟件後,用機械手的手持單元移動機械手Z軸,調整好照相機的高度;移動X、Y軸,調整好相機位置,使得(dé)在電腦屏幕上可以清晰看到標準量塊的影像;按下(xià)C C D的專用(yòng)軟件的軟快門(mén),對量塊進行照相。對剛照相的照(zhào)片進行數字化處理(lǐ)後,可以得到照相機坐標係和量塊之間的夾角值。將機械手操作設置為手(shǒu)動方式,用手持單(dān)元操作第四軸C軸(zhóu),使得C軸旋轉一個角度,剛(gāng)好(hǎo)等於或(huò)者接(jiē)近上麵找到的照相機坐標(biāo)係和(hé)量塊之間的夾角(jiǎo)。請注意,轉動(dòng)旋(xuán)轉軸C軸時要確認(rèn)旋轉方向不要搞錯。
(4)這時(shí),機械手坐標係和相(xiàng)機坐標係之間已經基本平行。記錄這時的機械手的第四軸的當前C坐標值。(這個值在後麵要用到,而且極(jí)為重要。)我調整的結果是C=103.72°,此時(shí)照(zhào)相機坐標係和量塊之間(jiān)的夾角值等於0.1°。
4. 通過CCD來測定第五軸安裝偏移尺寸
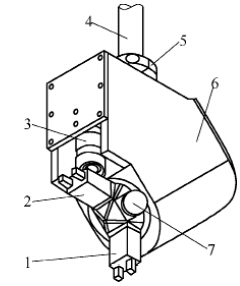
第五(wǔ)軸裝(zhuāng)配完成之(zhī)後,由於製造和裝配(pèi)原因(yīn),不可能(néng)使得C C D相機的鏡頭中心、Z/C軸中心、電磁吸盤中心保證(zhèng)在同一條直線上(shàng)。而且C C D相機到(dào)Z/C軸中心距離偏差、電磁吸(xī)盤中心(xīn)到(dào)Z/C軸中心距離偏差由於第五軸的箱體結構不規則無(wú)法準確測量。為了這幾個尺寸(很重要,後麵算法中要用到),曾測量過多次(見圖3),但獲得的值都不同(tóng),
測量誤差很大;用多次測量求平均值法,效果也(yě)不理想。
圖3 第五軸相關尺(chǐ)寸的測量
電磁吸盤向下,仰視(shì)圖)
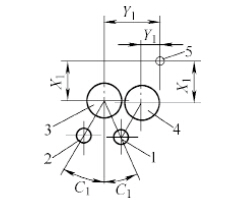
圖4 吸盤中心到C軸(zhóu)中心偏移值測量模型(xíng)
1.旋轉前電磁吸盤中心(xīn)位置2.旋轉後電磁吸(xī)盤中心位置3.平移前C軸中心(xīn)位(wèi)置 4.平(píng)移後C軸中心位置5.機械手坐標係原點
(1)利用坐標旋轉,測(cè)量(liàng)和計算電磁吸盤中心到Z/C軸中心的坐標偏移(yí)值。測量原理和測量計算過程:在(zài)料盤上放置一個和電磁吸盤直徑等大的標準圓形量塊,移動機械手(shǒu)坐標(biāo),將電磁吸盤(pán)精確對準測量塊,(C軸位置3,電磁吸盤位置1),記錄此時的X0、Y0、Z0及C0坐標值。然(rán)後將機械手Z軸稍高一(yī)些(xiē),任意方向旋轉C軸(zhóu)後(C軸位置3,電(diàn)磁吸盤位置2),再將電磁吸盤精確對準測量塊(C軸位(wèi)置4,電磁吸盤位置(zhì)1),記錄此時的X1、Y1、Z1及C1坐標值。測量和算法模型(xíng)如圖4所示:吸盤中(zhōng)心到C軸中心偏移值測量模型(模型以機械(xiè)手坐標係定義為準)。通過下麵的計算得到電磁吸盤中心到(dào)C軸中心的偏移值X、Y。首先計算電磁吸(xī)盤中心到C軸中心距離r(旋轉(zhuǎn)半徑):
其次計算磁吸盤中心到C軸中心的偏(piān)移值(zhí)X、Y
計算結果就是圖3中的c、d尺(chǐ)寸。機械手的旋轉中心是C 軸中心。在測量中, 電磁吸盤直徑d=25 m m,采用標準圓形量塊(kuài)直徑d '=24.78 m m。將標準測量塊放置(zhì)到料盤中,移動機械手的C=103.72(上(shàng)麵的測量值),然後移動並精(jīng)確定位X、Y、Z、C坐標,使得電(diàn)磁(cí)吸盤(pán)和(hé)標準量塊(kuài)外圓周邊等距,有經驗的操作(zuò)工或者裝(zhuāng)配工可以做的很精確,大約0.02 m m之內。從手持單元麵板上可以直接得到當前的X、Y、Z及C的坐標值。
(2)利用(yòng)C C D測量電磁吸盤中心(xīn)到C C D相(xiàng)機鏡頭(tóu)中心的偏移值。在料盤中放置標準圓形量塊,調(diào)整C軸角度(dù)C=103.72,確保相機坐標(biāo)係和機械手(shǒu)坐(zuò)標係平行。移動機械手坐標軸X、Y、Z,使得電磁吸(xī)盤和標準圓形量塊幾乎重合(越精確越好),讀取此時的X0、Y0、Z0及C0坐標值,並記(jì)錄備用。啟動(dòng)C C D相機專用軟件後,移動機械手使得在筆記本電腦的屏(píng)幕上可以清晰(xī)地看到刀片的影像後,按動相機軟件中的軟快門進行照相。通過影(yǐng)像的數字化處(chù)理,可以得到量塊中心到影像中心的坐標偏差值d x、d y(相機坐標係和(hé)機械手坐(zuò)標係不同,需(xū)要將d x、d y值互換,請注意)。讀取當前的機械(xiè)手的坐標X1、Y1、Z1及C1值,計算得到電磁吸盤中心到CCD相機鏡(jìng)頭中心的偏移(yí)值
(3)計(jì)算照相中心到C軸(zhóu)中心的坐標偏移值。由於上麵已經得到(dào)了相機中(zhōng)心到電磁吸盤(pán)中心的坐標偏(piān)移值,因此很(hěn)容易得到照相中(zhōng)心到C軸中心(xīn)的坐標偏移值。也就是
圖3中的a、b尺寸
5. 用CCD相機處理料盤中刀片的位置和方向
通過C C D照相並數字化處理,將料盤中的刀片位(wèi)置和放置方向數據(jù)提交到機械手控製器,通過機械手控製器(qì)中(zhōng)運行的程序進行數據(jù)處理、坐標變換後,轉換為機械手(shǒu)的
坐標(biāo)值,以便機械手能準確移動到刀(dāo)片位置進行(háng)精確抓取。C C D 照相機對影像進(jìn)行數值化處理,輸出刀(dāo)片中心到料盤碼垛坐標的中心偏移值dx、dy,同時輸出在料盤中的刀片放置時的最大影像半徑處的刀片頂點坐標值(x,y),照相並影(yǐng)像數字化處理成功/失敗的標誌,如果照相失敗則重新照相。通過(guò)網絡數據輸入,將數據傳送到機械(xiè)手(shǒu)控製(zhì)器中運行程
序中,通過計算可得到刀片放置角度α。首先將C軸旋轉一個角度α,並(bìng)計算出C軸旋轉角度(dù)α後吸盤中心到C軸中心(xīn)的偏移值(m d d x、m d d y),所有的計算都是矢量(liàng)計算,包含有坐標方向。其次機械手移動一個偏移值,即
這樣處理以(yǐ)後,電磁吸盤在從料盤碼垛位置取刀片時,就能精確(què)吸取刀片。這種算(suàn)法適合國標G BT2076-1987中規(guī)定的全部刀片的抓取以及部分非標刀片的抓取。通過機床(chuáng)實(shí)際(jì)試驗,電磁(cí)吸盤從料(liào)盤上取得刀片的實際偏差在0.1 m m之內,基本上能保證(zhèng)正常(cháng)的自動上(shàng)、下料要求。
6. 機械手自動從料盤中取刀片的(de)程序流程
機械手控製程序流程如下:
(1)設定當前的刀片的碼垛位坐標,並計算(suàn)出相應(yīng)的照相位坐標。
(2)機械手移動到當前碼垛的(de)照(zhào)相位,進行照相。
(3)照相影像(xiàng)數字化處理,輸出結(jié)果,並通過(guò)局域網(wǎng)絡發送到機械手控製器。
(4)程序接收照相二(èr)值化(huà)處理結果(guǒ)數據,計算當(dāng)前碼垛位上的刀片中(zhōng)心坐標和刀片的放置方向(角度α)。
(5)計算機械手C軸旋轉之後吸盤的偏移值。
(6)機械手旋轉C軸,並移動X、Y坐標,電磁吸盤移(yí)動到刀片中(zhōng)心抓取刀片(piàn)。
機械(xiè)手從(cóng)料盤中抓取(qǔ)刀片的實例:在機械手控製器上,選擇自動工(gōng)作方式,選(xuǎn)擇測試(shì)程序,按程序執行鍵(當(dāng)然料盤上碼垛定義點已經手動采集(jí),具體采集方法參看三(sān)
菱機械手相關資料),查看電(diàn)磁吸盤抓取刀片的情況。下(xià)麵圖5、圖6及圖7是機械手從料盤中抓取刀片的實例。

圖5 機械手向刀片中心位置移動
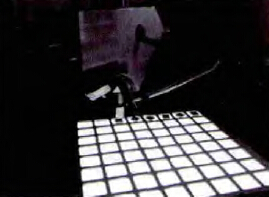
圖6 電磁吸盤(pán)正在吸取刀片

圖7 電磁吸盤吸取刀片的效果
7. 結語
在對機械手調試過程中,通過C C D攝像頭照相/影像處理,巧妙地(dì)解決了人工無法測量的(de)幾個關鍵尺寸,解決了刀(dāo)片抓取的精度問題。在試驗(yàn)的過程中,隨機放置三刀片、正方形刀片及菱形刀片等(děng),均(jun1)能準確找到刀片的放置角度和中心點,測試效果備受鼓舞,為機(jī)床的全麵調試和試切(磨削)贏得寶貴時間,獲得(dé)領導(dǎo)和同仁的一致好(hǎo)評。
如(rú)果您有機床行業、企(qǐ)業相(xiàng)關新聞稿件(jiàn)發表,或進行資(zī)訊合作,歡迎聯係本(běn)網(wǎng)編輯部, 郵(yóu)箱(xiāng):skjcsc@vip.sina.com

查")
- 2024年11月(yuè) 金(jīn)屬切削機(jī)床產量數據
- 2024年11月 分(fèn)地區金屬切削機床產量數據
- 2024年11月 軸(zhóu)承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽(qì)車產(chǎn)量數據
- 2024年11月 新能源(yuán)汽車銷量(liàng)情況
- 2024年10月 新能源(yuán)汽(qì)車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據(jù)
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據(jù)
- 2028年8月 基本型乘用車(轎(jiào)車)產量數據