



當 AI 遇上(shàng)機械臂?NVIDIA 再破局,讓(ràng)下一(yī)代機器人技術觸手可及
2024-10-8 來源:- 作者:-
在工業應用中,機械臂很長一段時(shí)間都被當作一個(gè)特定(dìng)動作的強執行機構使用,例如在固定場景下進行定點上下料、搬運、焊接、塗膠等動作,但我們的世界並不是一條可預測的生產(chǎn)線。
近幾年,人們對個性化的需(xū)求越來越(yuè)高,普通流程化製造的商品越來越難以滿足需求,小批量、多品種的趨(qū)勢席(xí)卷了汽車、電(diàn)子、家電等各類消(xiāo)費品,一體化、柔性化成為了機器人行業及製造業發展的主流趨勢。在此背景下,機械臂也正經曆著從單一功能向多功(gōng)能、從固定場景向靈活應用的深刻轉變,朝著更智(zhì)能的方(fāng)向發展。
目前,機械臂技術在高精度和可重複性方麵取(qǔ)得了顯著進展,然而,這種(zhǒng)出色的(de)精度往(wǎng)往未能有效地轉化(huà)為對許多日常物體的操縱能力(lì),這為機器臂開發乃至整個行業都帶來了新的挑戰,AI 的到來或許能(néng)夠(gòu)破局。
以打造 AI 芯片而(ér)聞(wén)名,近年來,AI 的蓬勃發展已使 NVIDIA 成為全球最具價(jià)值的公司之一(yī)。在今年 3 月的 GTC 上,NVIDIA 創始人兼首席執行官黃仁勳將(jiāng)機器人稱為“物理形態的人工智能”,並(bìng)預(yù)言,機(jī)器人將成為“AI 發展(zhǎn)的下一(yī)波浪潮”,會上發布的(de)眾多新品(pǐn),向行業(yè)展(zhǎn)示了其進軍(jun1)機器人賽道(dào)的決心。
針對機械臂(bì),NVIDIA 發布了 Isaac Manipulator,可幫助開發商利用 AI 加快構建產品(pǐn),AI 與機械臂的完美結合,也將有效推動機械(xiè)臂在複雜任務執行上的邊界能力。
力求(qiú)為(wéi)行業帶來“智慧”機械臂
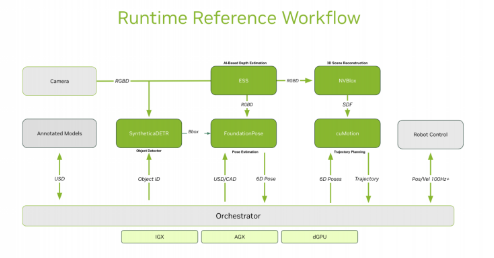
具(jù)體來看(kàn),NVIDIA Isaac Manipulator 是 NVIDIA 專為機械(xiè)臂設計的一款綜合性 AI 解決(jué)方案,可為機械臂提供一係列先進的運動生成和模塊化(huà) AI 功能,以及各種強大的基礎模型和 GPU 加速庫,可(kě)助力企業快速構建能夠無縫感知、理(lǐ)解並與環境交互的(de)機械臂,幫助企業加速解決在動態(tài)環境下的挑戰。
圖片來源:NVIDIA
Isaac Manipulator 的誕生並非偶然,而是 NVIDIA 在計算領域長期積累和創新的結(jié)果(guǒ)。Isaac Manipulator 充分利(lì)用了 NVIDIA 在 GPU 計算領域的深厚技(jì)術,其為機械臂提供的一係列 GPU 加速庫能夠顯著提升機械臂路徑規(guī)劃、雙目視覺深(shēn)度感知、目標檢測等關鍵任務的計算速(sù)度,這種加速能力使得(dé)機械臂能夠在更(gèng)短的時(shí)間內完成複雜(zá)任務,提高生產效率和響應速度。
除(chú)強大(dà)的 GPU 加速能力(lì)外,零樣本感知是 Isaac Manipulator 進行目標檢測的(de)另一大技術亮點。在機器人(rén)技術領域,實(shí)現可泛化的機器人操縱一直是研(yán)究的熱點。
為了實現可泛化(huà)的機器人操縱,傳(chuán)統機(jī)械臂在執行新任務時往往需要依賴於海量數據進行模仿學習(xí),但是(shì)在真實場景中(zhōng)收集充足的機器(qì)人數據過於昂貴,導致成本問題顯(xiǎn)著。
而 Isaac Manipulator 先進的零樣本感知技術,使機械臂(bì)能夠在沒有(yǒu)預先訓(xùn)練數據的情況下,快速適應新環境和新任務,這(zhè)一技術突(tū)破極大地提高了機(jī)械(xiè)臂的靈活性和適應性,且降低了企業的開(kāi)發成本(běn)和周期。
Isaac Manipulator 還提(tí)供了一係列可定製(zhì)的(de)模塊化 AI 組件,包括(kuò)各種強大的基礎模型、感知算法、運動(dòng)規劃等(děng)。
具(jù)體包括:用於對以前未見過(guò)的物體進行(háng) 6D 姿勢估計和追蹤的開(kāi)創性基礎模型 FoundationPose;通過同時運行多個軌跡(jì)優化來解決工業規模機器人(rén)運動規劃問題的 GPU 加速運動規劃器 cuMotion;基於 transformer,可對(duì)未(wèi)知(zhī) 3D 物體進行密集(jí)抓取預測的一種新的統一基礎(chǔ)模型 FoundationGrasp(即將(jiāng)上市(shì));可加快新對象(xiàng)的檢測、渲染和訓練速度的適用於室內環境(jìng)的對象檢測模型 SyntheticaDETR。
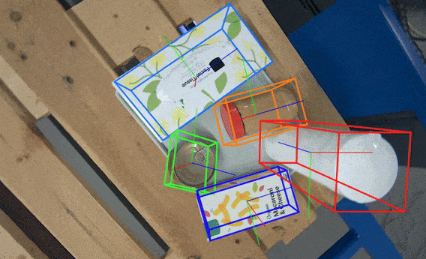
圖片來源:NVIDIA

圖(tú)片來源:NVIDIA
開發者(zhě)可以根據具體任務需求自由組合這些組(zǔ)件,構(gòu)建出(chū)最適合的解決方案。這種高度模塊(kuài)化(huà)的設(shè)計簡(jiǎn)化了開發流程,滿足不同行業(yè)對機械臂智能化的需求,使(shǐ)機械臂能夠更廣泛地應用於各種工業製造場景,也為企業的數字化轉型和智能化升級(jí)提供了有力支(zhī)撐。
在真實場景下決勝最後(hòu) 1 厘米
隨著 AI 與機器人技術的飛速(sù)發展,機器人被譽(yù)為通往自動化的“最後一公裏”,而(ér)讓機器人技術觸手可及的機械臂則是(shì)實現智能化操作的“最後一厘米”。基於 NVIDIA Isaac Manipulator,現代智能機械臂有望在工業製造、柔性物流、商用(yòng)服務等場景(jǐng)中廣泛落地。
在(zài)探討機械臂技術的諸多方麵(miàn)時,末端執行器是(shì)其中尤為關鍵的一環(huán)。機械臂要真正實現類人手(shǒu)臂(bì)般的作業,末端(duān)執行器的抓取、放置、遠程(chéng)操作等多(duō)樣化用途顯得尤為重要。然而,開發經濟實惠(huì)、易於使用且功能豐富的末端工具仍是科研(yán)人員(yuán)麵臨的一大問題。
Alphabet 旗(qí)下軟件和 AI 機器人子公司 Intrinsic 在今年 5 月(yuè)份芝加哥(gē)舉行(háng)的 Automate 展會上,重點展示了由 Isaac Manipulator 賦能的基(jī)礎模(mó)型在推進機器人末端執行器開(kāi)發上的技(jì)術突(tū)破。
Intrinsic 在其跨機器人軟件平台中成功測試了 Isaac Manipulator,向行業展示(shì)了一種可擴展且普適的機器人抓握潛力,這種技能可(kě)以作用(yòng)於不同的抓手、環境和物體,使機械臂實(shí)現與人手臂相仿的靈活性。

圖片來源:Intrinsic
據介紹,借助 NVIDIA Omniverse 平台上的 NVIDIA Isaac Sim,Intrinsic 利(lì)用金屬板和吸力抓手 CAD(計算機輔助設計)模型生成了(le)真空抓取的合成數據,以此創建出了(le)一(yī)個原型。
該(gāi)原型使用 Intrinsic Flowstate 實現流程可視化、相關感知和運動規劃,通過一套包含 Isaac Manipulator 的工作流,生成抓取(qǔ)姿勢和由 CUDA 提供加速的機器人運動。這(zhè)些運動先通過 Isaac Sim 進行仿真評估以節省成本,隨後再通過 Intrinsic 平台部署到現實世界中(zhōng)。這一測試(shì)也充分驗證了 Isaac Manipulator 在機(jī)械臂開發上的卓越性。
作為工業機器人的重(chóng)要分支,協作機器人已成為機器人產業的(de)必爭(zhēng)之地(dì),而提高協作機器人(rén)的性能更是(shì)推動整個行業(yè)技術進步的關(guān)鍵。
近些年(nián),全球協作機(jī)器人巨頭優傲(ào)機器人一直在加強其產品的 AI 能力,該公(gōng)司與(yǔ) NVIDIA 在 AI 領域有著深度合作。據悉,優傲機器人正在將 Isaac Manipulator 集(jí)成到其 PolyScope X 軟件(jiàn)平台中,以解鎖新的協作機器人(rén)解決方案。
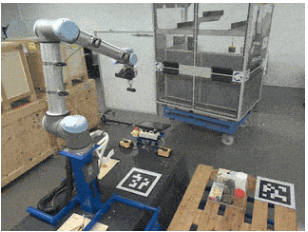
圖片來源:優傲機器(qì)人
PolyScope X 作為優傲機器人的軟件平台,已經支持多(duō)樣化的編(biān)程方(fāng)式(shì)和靈(líng)活部署,為用戶提供(gòng)了便捷的操作體驗,集成更多先進的 AI 功(gōng)能後,將(jiāng)給整個行業帶來更強大、更智能的機器人解(jiě)決方案(àn)。
而 Isaac Manipulator 作為先進的 AI 工具(jù),具(jù)有強大的路徑規劃和抓取姿勢生成能力,如果成功集成到 PolyScope X 軟件(jiàn)平台,將顯(xiǎn)著提升優傲機械臂(bì)的自動化水平和靈活性。
此外,cuMotion 路徑規(guī)劃器利用 NVIDIA GPU 的並行處理能力,不僅可以自動計算無碰撞軌(guǐ)跡的路徑規劃,還可以根據其他標準(如速度、最小磨損或能源效(xiào)率)進行路徑優化。
cuMotion、PolyScope X 和優傲協作(zuò)機器(qì)人的結合將使一係列以前無法完全自(zì)動化的應用程序成為(wéi)可能,它(tā)還可以(yǐ)改進現有的編程概念(niàn),對於客戶來說,該技(jì)術可以簡(jiǎn)化常(cháng)見工業應用的設置,促進機器人在高混(hún)合、低體積場景中的采用,大大提高自動化客戶的效率(lǜ)。
寫在最後
中國機械臂(bì)市場規模近年來呈現出顯著的增長趨勢。據市場研究機構數據顯示,2022 年我國機械臂市場規模接近 178.3 億元,2023 年市(shì)場規(guī)模增至 186.4 億元。隨著全球製造業升級和自動化需求的推動,機械臂在汽車製造(zào)、電子製造、物流倉儲等領域(yù)的應用將持續(xù)擴大,預計到 2025 年,國內機械臂市場規模總值將超過 200 億。
而 AI 技術對機械(xiè)臂開發的重要意(yì)義在於(yú),它賦予了(le)機械臂更高級別的智能化能力,使其能夠感知(zhī)、理解和適應環境,執行更複雜和精細的任務。NVIDIA Isaac Manipulator 為(wéi)機(jī)械臂的創新和發展提供了強大的技術支持(chí),它也為機械臂開辟了更廣闊的(de)應用前(qián)景。
隨著科技的(de)融合應用,未來的機械臂(bì)將不僅(jǐn)僅是執行簡單任務的工具(jù),更將成為智能製造係統中的決策者和協(xié)調者。在這種發展趨勢(shì)下,隻(zhī)有不斷提升機械(xiè)臂的控製(zhì)精度和智能水平,才(cái)能滿足未來複雜生產環境的需要,讓機械臂在汽車製造、3C 電子、醫療、物流等關(guān)鍵細分市場(chǎng)大有作為。
投稿箱:
如果您有機床行業、企業相關(guān)新(xīn)聞(wén)稿(gǎo)件發表,或進(jìn)行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關(guān)新(xīn)聞(wén)稿(gǎo)件發表,或進(jìn)行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關信息
州金馬")
業界(jiè)視點
| 更多

行業數(shù)據
| 更多
- 2024年11月 金屬切削機床產量數(shù)據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘(chéng)用車(轎車(chē))產量數據
- 2024年11月 新能源汽車產量數據
- 2024年11月(yuè) 新能源汽車銷量情況(kuàng)
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削(xuē)機床產量數據
- 2024年(nián)10月 金屬切削機床產(chǎn)量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數(shù)據
- 2028年8月 基本型乘用車(chē)(轎車)產量數據(jù)