")



基於工業(yè)機器(qì)人的(de)數控加工控製係統設計(jì)
2021-7-21 來源:- 作者:-
摘要: 通過研究製造生產線數控加工單(dān)元和上下(xià)料係統,並分析數控機床和工業機器人工作原理和生產流程,設計一種基於 Modbus/TCP 協議的數控機床加工(gōng)單元控製係統。該(gāi)係統采用 S7-1200 PLC 作為主站,通(tōng)過以太網通信實現對工業機器人和數控機床協同控製。通過實際工程驗證,該係統具有通信穩定、響應速度(dù)快和工作效率高等特點。
關鍵詞: 數控機床(chuáng); 智(zhì)能製(zhì)造; Modbus/TCP; 工(gōng)業機器人
0 前言
隨著中國製造 2025 戰略的提出,提高裝備製造智能(néng)化水平已經成為製造業發展的趨勢,加工製造單元是智能製造的主要環節,其智能化程度對企業生產效率具有重要(yào)影響。為提高數控加工的智能化和信息(xī)化水平,設計基於(yú) Modbus/TCP 協議的工業機器人自動上下料係統,將數控機床、工業機器人、數據信息采集管控等加(jiā)工製造設備集成為(wéi)智能製造係統。通(tōng)過(guò)工(gōng)程驗證,係統(tǒng)通信穩定、工作效率高,該係統在加(jiā)工製造環(huán)節的應用對提高製造企業的智能製造水平具有重(chóng)要(yào)意(yì)義。
1、係統硬件結(jié)構(gòu)設計
基於工業機器人的數控加(jiā)工控製係統采(cǎi)用西門子S7-1200 係列(liè) PLC 作為(wéi)係統的中央控製器,型號為CPU1214C,PLC 集成 PROFINET 接口用於編程以及設備間通信,支持開放的以太(tài)網協議與第三方設備通信,通過工業(yè)交換機實現與機器人、數(shù)控機床等設備通信。計算機用於控製器 S7-1200 PLC 的(de)編程和工業機器人(rén)的編程(chéng)調試,通過工業交換(huàn)機將程序下載到 PLC 和工業機器人控製(zhì)器(qì),係統硬件結(jié)構如圖 1所示,係統網絡(luò)拓撲如圖 2 所示。
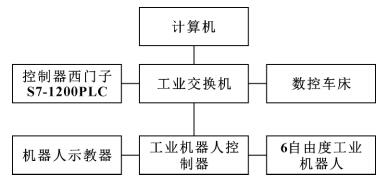
圖 1 統硬件結構

圖2 係統網絡拓撲圖
2 、係統網絡通信設計(jì)
Modbus/TCP 是運行在 TCP /IP 上的 Modbus 報文傳輸協議,通過此協議,控製器相互之間通過網絡(luò)和其他設備進行通信。控製器 S7-1200 PLC 與工業機器人李群 QKM 間采(cǎi)用 Modbus/TCP 通信協(xié)議,Modbus/TCP 協議是標準的(de)網絡通信協議,利用控製器上的 PN 接口與工業機器人進行通信。
2. 1 控製器 PLC Modbus/TCP 協議
在 S7-1200 PLC 編程軟件(jiàn) TIA Portal V15 中調用Modbus/TCP 的庫指令 “MB _ CLIENT” 和 “MB SERVER”, “MB_SERVER”指令作為(wéi) Modbus/TCP服務器通過控製器 S7-1200PLC 的 PROFINET 連接通信,使用該(gāi)指(zhǐ)令,無需其他任何硬件模塊。S7-1200PLC Modbus/TCP 通信程(chéng)序如圖 3 所示,“MB_SERVER”指令將 處 理 Modbus/TCP 客 戶 端 的(de) 連 接 請 求、接(jiē)收 Modbus 功能的請求並發送響應; 通過 “MB_CLIENT”指令,在客戶端(duān)和服務器之(zhī)間建立連(lián)接、發送請求、接收(shōu)響應並控製 Modbus/TCP 服務器連接終端。
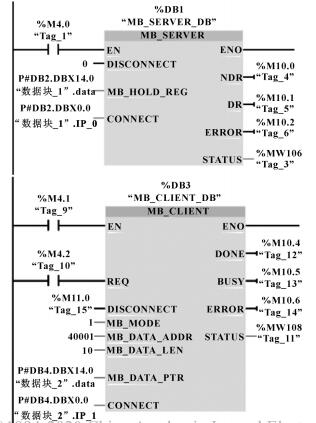
圖3 S7-1200 PLC Modbus/TCP 通信程序
2. 2 控製器 PLC 與機器人(rén)通信
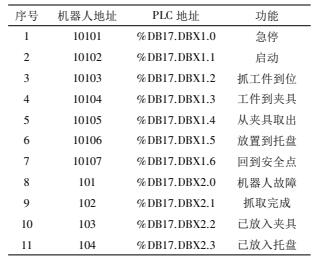
S7-1200 PLC 為係統(tǒng)的主控製(zhì)器,用來接收上(shàng)位機控製信息並進行分析,然後將控製指令發送給執行設備。控製器 S7-1200 PLC 與數控機床的通信通(tōng)過硬件 I/O 方(fāng)式來(lái)實現機床上(shàng)下料數據交互。為提高(gāo)信號抗幹(gàn)擾(rǎo)能力,在 PLC 信號輸出端(duān)增加光電隔(gé)離模塊。機器人與 PLC 數據交互的(de)主要地址分配如表 1所示。
表 1 機器人與 PLC 數(shù)據交互主要地址分配
機器人(rén)與控製器 PLC 交互的目的主要是接 收PLC 發來的動作控製命令,執行相應示教動作任務,並(bìng)將自(zì)身運行狀態信息返回至 PLC,保證整個係統正常運行,控製流程如(rú)圖 4 所(suǒ)示(shì)。工(gōng)業機器(qì)人反饋給主(zhǔ)控(kòng)製器 PLC 的信息主要(yào)包括對各指令的響(xiǎng)應和係統狀(zhuàng)態信息的反饋,同時還包括機器人自身的運行狀態,如空間坐標、工作模式等信息(xī) 。
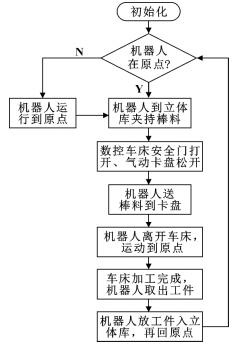
圖4 係統控製流程
2. 3 機(jī)器人與數控機床通信(xìn)
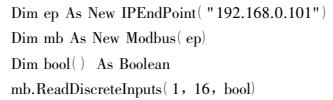
采用李群自動化六軸工業機器人,型號為 QKMHL6; 數控機床安全門、夾具(jù)和加工狀態以布爾量存放在指定(dìng)寄存器(qì)中,機器人從(cóng) Modbus 設備上讀取多個寄存(cún)器的值; 通過判斷不同寄存器的布(bù)爾量,完成設定 的 動 作 軌 跡; 數 控 機 床 端 IP 地 址 配(pèi) 置 為192. 168. 0. 101,機器人端數據通信程序如下。
3、 機器人運動軌跡規(guī)劃
為了提高自動上下料工業機(jī)器人的工作效率和精度,根據機器人運動路(lù)徑和末(mò)端位置姿態,通過調(diào)整運動軌跡平滑參數(shù),在兩條直線路徑中規劃一段過渡路(lù)徑。由於機器人在數控車(chē)床上下料(liào)中的運動主要是直線路(lù)徑,在相鄰(lín)的 2 個路徑上確定出過(guò)渡點,采用線性軌(guǐ)跡(jì)圓弧過渡(dù)。直線(xiàn)路徑采用圓弧過渡算法簡(jiǎn)單且通過編程(chéng)易於實現,該指令必(bì)須在兩段運動指令間(jiān)執行。係統設(shè)計(jì)的效果圖與實物圖如(rú)圖 5 所示。
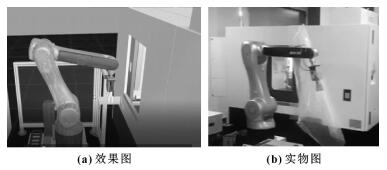
圖 5 係(xì)統設計效果圖與實物圖
根據機器人(rén)放置工件需要,機器人末(mò)端夾具需要垂直到(dào)達起(qǐ)始位置 P1,位置 P1 到位置(zhì) P2 采(cǎi)用(yòng)直線軌跡如圖(tú) 6 所示運動軌跡,從(cóng)位置 P1 水平運動到目標位(wèi)置 P2 垂直 50 cm 處(chù),再垂直運動 50 cm 到達目標位(wèi)置,通(tōng)過(guò)設置機(jī)械下一個運動(dòng)距離與當前運動距離重疊 50%,機器人實際運動的軌跡(jì)如圖 7 所示。
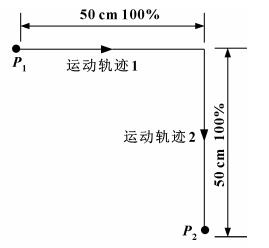
圖 6 直線(xiàn)運動軌跡
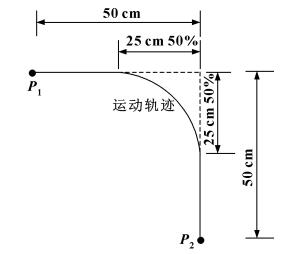
圖7 圓弧過渡直線軌跡
起始位置 P1 到(dào)目標位置 P2 之間采用機器人Move. ForceOverlap 指令,實現下一個運動距離與目標距離重疊百分數,程序 Move. ForceOverlap ( 0,50)實現 2 個距離重疊 50% 。
4 、結論
數控加工單元是智能製造的重要組成部分,為了提高製造加工單元的自動化程度和工作效率(lǜ),設計了基於工業機器人的數控(kòng)加工製造控製係統。該係統通過協同(tóng)控製工業機器人和數控(kòng)機床,實現了(le)機床的自動上下料工作,通過實際工程驗證了控製係統的可靠性,數控加(jiā)工效率和安(ān)全性得(dé)到了提高。
作者(zhě):龐黨鋒1,2,宋亞傑2,王春光2,劉彥磊2,李(lǐ)傳軍2
來源:1. 天津職業技術師範大學信息傳感與智能控製重點實驗室
2. 天津中(zhōng)德應用技(jì)術大學機械(xiè)工程(chéng)學院
投稿箱:
如果您有機床行業、企業相(xiàng)關新(xīn)聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相(xiàng)關新(xīn)聞稿件發表,或進行資(zī)訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多
")
行業數據
| 更多
- 2024年11月 金(jīn)屬切削機床產量數據
- 2024年11月 分地區金屬切削(xuē)機床產量數據
- 2024年(nián)11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能源汽車產量數據(jù)
- 2024年11月 新能源汽車銷量(liàng)情況
- 2024年10月 新(xīn)能(néng)源汽車(chē)產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區(qū)金屬切削機床產量數據
- 2024年10月 金(jīn)屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型(xíng)乘用車(轎車)產量數(shù)據(jù)