



基於多體係統理論的榫卯加工中心夾具係統精度建模(mó)分(fèn)析(xī)
2017-12-25 來源: 北京工業大學(xué) 機械工程與應用電子技(jì)術學 作者:劉誌峰 趙林(lín)忠 李迎 孫光輝 馬雷
摘要: 針對榫卯加工中(zhōng)心加工過程中出現加工誤差大的現象,分析造成誤差(chà)的主要誤差源是夾具係(xì)統。榫卯加工中心(xīn)的夾具係(xì)統采用螺栓定位,較大影響了整個夾具係統的裝配精度,對整體加工造成較(jiào)大的(de)加工誤差。根據該夾具係統的機械結構及其連接方式,提出基於多體係統運動學理論和齊次變換的方法,建立榫卯加工中心夾具係統的誤差模型,並推導了考慮裝配誤(wù)差的最終誤差公式。針對運用螺栓定(dìng)位造成的加工(gōng)缺陷,並考慮夾具(jù)係統的特殊性(xìng),提出了一種夾具係(xì)統改(gǎi)進方案,並利用多(duō)體係統運動學理論建立誤差模型(xíng),為提高榫卯加工中心加工精(jīng)度提供理(lǐ)論依據。
關鍵詞: 夾具係統; 裝配精度; 多體係統; 齊次變換; 誤差模型
0 引言
數控機床中(zhōng)的夾(jiá)具係統對整個機床整體的加工精度(dù)有著重(chóng)要的影響,其中工(gōng)作台作為夾具係統的關(guān)鍵部位,其工作精度和裝配精度對夾具係統(tǒng)有著較(jiào)大(dà)的影(yǐng)響。因(yīn)此對(duì)其精度(dù)設計是非常有必要的,也是(shì)優化設計的重要環節。對(duì)夾具係統進行精(jīng)度設計(jì)需建立其誤(wù)差模型,本主要進行對夾具係(xì)統中部件裝(zhuāng)配時產生的空間幾何誤差分析,不考慮其受熱變形及受(shòu)力(lì)變形所產生(shēng)的(de)誤差。在機(jī)械結構空間誤差建模方麵,世(shì)界各國專家學者經過多年研究已經發展出誤差矩陣法(fǎ)、機構學建模法、剛體運動學(xué)等多種建模方法(fǎ)[1],而多體係統理論是對一般複雜機械係統(tǒng)的完整抽象和有效描述,是分析和研究(jiū)複雜機械係統的最優模式[2],目(mù)前已經(jīng)在(zài)機器人,機床,坐標測量機等(děng)複雜(zá)機械的運動分析與控製中得(dé)到成功應用,並且應用領域正在不斷擴大[3]。劉又午等人[4]已經曾利用多(duō)體係統理論對機床建模(mó)進行了係統性的研究,並(bìng)且已經取得了很多成(chéng)果。
在回轉工作台精度分析方麵,主要還是以傳統建模方法為主。精(jīng)度分配的方法主要有尺(chǐ)寸鏈理論法[5]、蒙特卡洛法[6]等。外王禹林等人[7]為螺杆轉子磨床精度分配建立了一種多目標參數化模型,這些工作都將為夾具係統精度建(jiàn)模分析提供有益的幫(bāng)助。基於多體係統理論[8]建立(lì)的木工機床夾具係統誤差模型,能夠描述夾(jiá)具係統中各個組(zǔ)成部分在裝配時由於部件製造精度以及它們之間的約(yuē)束方式造成的誤(wù)差是怎麽通過結構關係以及相對運動轉化成最終整(zhěng)體的定位誤差,由此可以定量分析出各類基(jī)本誤差對整體加工誤差的影響情況,從而為夾具係統的精度建模和設計優化提供依據。
1 、拓撲結構和低序體(tǐ)陣(zhèn)列
多體係(xì)統誤差建模(mó)方法是將工程對象抽象為多體係(xì)統[9],用低序體陣列來(lái)描述拓撲結構中各體之間的關聯,在多體係統中(zhōng)建立廣義坐(zuò)標係,在(zài)坐標係中(zhōng)采用(yòng)4 × 4 階齊次特征矩(jǔ)陣運算表示點和(hé)矢量在(zài)坐標係中的位置和姿(zī)態的變換(huàn),而(ér)拓撲結構是對多體係統本質的高度提煉和概括,是研究多體係統的依據(jù)和基礎。羅伯森和威(wēi)騰伯格(gé)提出的基於圖論和休斯頓和劉又午的運用低序體(tǐ)陣列描述多體(tǐ)係統拓撲結構的(de)兩種基本(běn)方法,其中,低序體(tǐ)陣列是通過多體係統拓撲結(jié)構更為簡潔方便,適合於計算機自動描述多體係統,本文采用的是拓撲結(jié)構(gòu)的低序體陣列描述法。
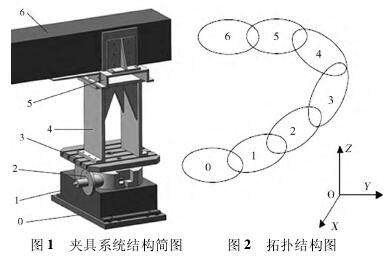
本文所研究的夾具係統,它是一種(zhǒng)專為木工機械開發的夾具,具有高(gāo)穩定性、高剛度、高速度等特點(diǎn),適合用(yòng)於木工加工。該夾具係統主要是由溜板、轉台座、轉台、台麵、夾具體 1、夾具體 2 以及工件組成。對圖 1所示的夾具係統(tǒng)進行提煉和概括(kuò),就可得到如圖 2 所示的拓撲結構簡圖。
對圖 1 的夾具係統進行簡述如下: 0—溜板,1—轉台(tái)座(zuò),2—轉台,3—台(tái)麵,—夾具體 1,5—夾具體(tǐ) 2,0—工(gōng)件。坐標係設置如下:
①在溜板和所部件上,建立笛(dí)卡爾坐標係;
②係統各(gè)元素 X、Y 分別平行,Z 軸同軸。
在多體係(xì)統分析中,我們把構成拓撲結構的單元稱為體,描述體與體關聯關係的低序體陣(zhèn)列可通(tōng)過下列定義的低(dī)序體運算得到。一般的在多體係(xì)統中對任意體( V) 的低序定義如(rú)下:
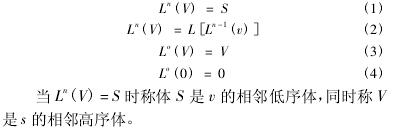
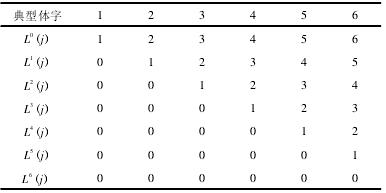
以圖 2 所示的多體係統拓撲結構為例,根據上述低序體運算公(gōng)式可(kě)以求出各體的各階低序體號,從而構成表 1 所示的低序體(tǐ)陣列,它即是夾具係統的低序(xù)體陣列。
表 1 夾具係統多體(tǐ)拓撲結構(gòu)的低序陣列(liè)
2 、特征矩陣
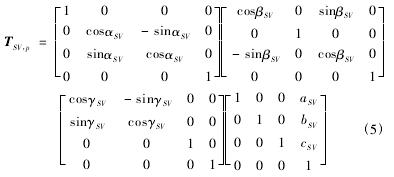
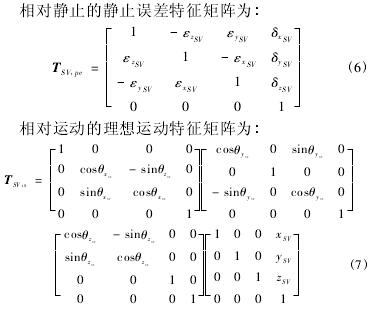
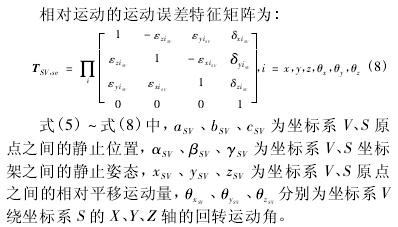
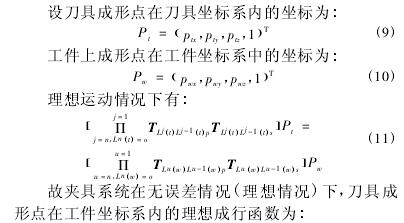
多(duō)體係統中各體之間的位置和運動關係,用相應的坐標係的位置和姿態變換來確定。根據子坐標係的位姿(zī)參數,可以得到各種確定的(de) 4 × 4 階齊次特征矩陣,而參數的變化與否反映了體與體之間(jiān)的相對(duì)靜止和(hé)相對運動狀況。在有誤差的多體係統中,對於任意相(xiàng)鄰(lín)體 S、V 的子(zǐ)坐標係,相對靜止( 或初始相對靜止) 的理想靜止特征矩陣(zhèn)[10]為:
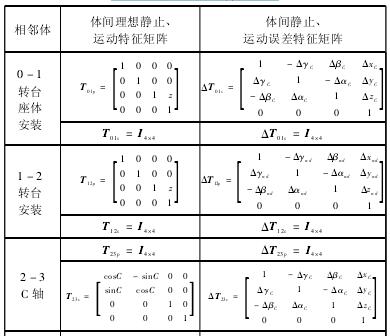
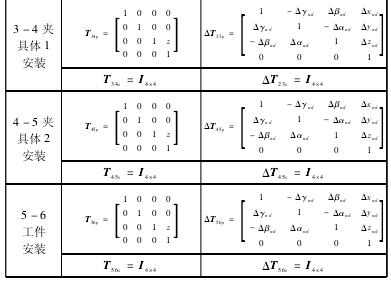
對本夾具係統的結構進行分析可知: 在夾具係統中各部件之間除組件 2 和組件 3 之間有旋轉關係,其餘部(bù)件都是由螺釘連接,不可避免的在裝配時(shí)會出現誤差。由此(cǐ)根據加(jiā)工中心的(de)結構、各部件間的(de)運動關係,建立各相鄰(lín)近體間的變換(huàn)特征矩陣如表 2 所示。
表 2 夾具係統的(de)特征方程
3 、夾具係統誤(wù)差模型(xíng)建立
4 、夾具係(xì)統誤差(chà)分析
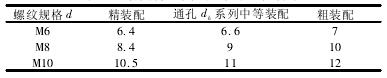
本文研究(jiū)的夾具(jù)係統固定采用 M8 螺釘固定。但螺栓不能起到聯接作用,不能用於定位。若兩(liǎng)個零件隻是(shì)平麵對(duì)接,沒有銷、孔聯接的時候,體之間的裝配誤差主(zhǔ)要由螺釘聯接(jiē)產生(shēng)。參(cān)照 GB 5277-85 緊(jǐn)固件、螺栓和(hé)螺釘通孔(kǒng)的標準(zhǔn),通孔公差有以下規定精裝配係列: H12; 中等裝配係列: H13; 粗裝配係列: H14。在選擇參數(shù)過程中,使用通孔(kǒng)公差 H12,並(bìng)根據零件加工圖紙中的形位公差確定各環節的轉誤差。具體標準如表 3 所示。
表 3 緊固件、螺栓和螺釘通孔標準
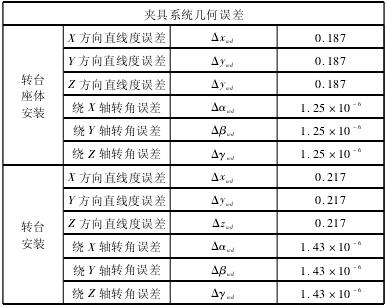
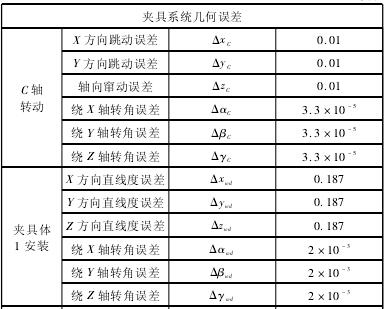
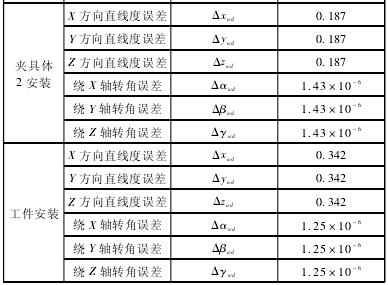
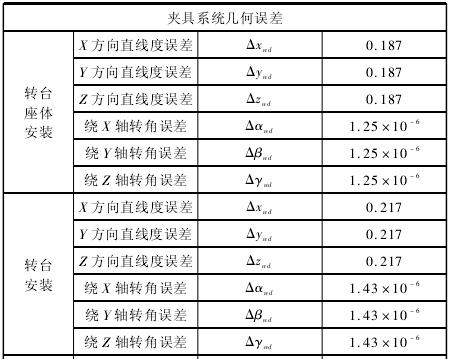
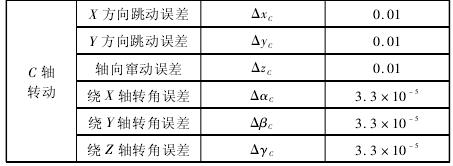
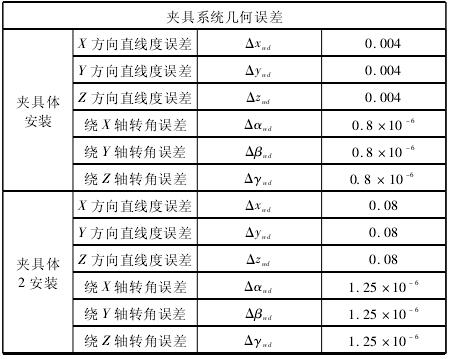
根據夾具零件加工尺寸公差及形位公差可以計算夾具係統的幾何誤差參數如表 4 所示。
表 4 夾具的幾何誤差
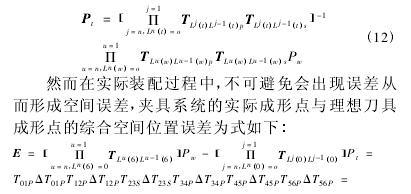
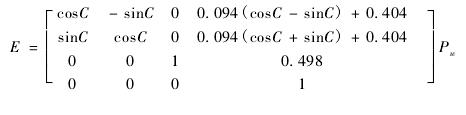
將以上數據帶(dài)入式( 13) 中得到如下(xià):

式中 Pw工件在工件坐標係中的(de)齊次坐標係,在夾具上(shàng)安裝距回轉(zhuǎn)中心 300mm 的試件,在轉台 0°和 90°的位置(zhì)用銑刀沿回轉中心對稱向加工兩個方形槽,兩(liǎng)個(gè)方向方形槽(cáo)相交打(dǎ)透,當考慮工件(jiàn)坐標係誤差單一(yī)因(yīn)素時,工件坐標係原點在機床坐標係中的產生的(de)誤差由以上設定的值(zhí),可得的取值範圍:
如(rú)果加工程序按照(zhào)理想狀態下工件(jiàn)坐標係的情況加工,加(jiā)工後的工件會出現極大的台階,不能滿足木工加工精度 0. 5mm 的(de)要求。
5 、夾具(jù)係統結構改(gǎi)進
經理論計算發現現有的夾具係統不能滿足加工要(yào)求,對夾具係(xì)統(tǒng)結構進行如(rú)下改造(zào): 簡化夾具體結構堆積層數,將夾具(jù)體直(zhí)接在轉台上加裝夾(jiá)具體,止口定位; 夾具體上方直接通過鍵定位,安裝(zhuāng)虎口鉗; 虎口(kǒu)鉗屬於精度較高並且具有自定(dìng)心功(gōng)能,盡可能(néng)的減小裝夾誤差; 夾具體采用圓筒(tǒng)形結(jié)構,增加剛度。
改造後的夾具(jù)係統如圖 3 所示,對圖 3 所示的夾具係統進行(háng)提煉和概括,就可得到如圖 4 所示的拓撲結構簡圖
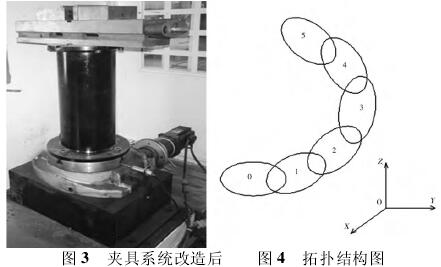
針對圖 4 的夾具係統的拓撲結構簡述: 0—溜板(bǎn),1—轉台座,2—轉台,3—夾(jiá)具體,4—夾具體 2,5—工件。改進後的夾具係統的空間誤差公式如下所(suǒ)示:
改進(jìn)後的(de)夾具係(xì)統對於轉台和夾具體之間(jiān)的聯接(jiē)改用鍵定位,並通過查閱(yuè)鍵(jiàn)與槽(cáo)公差配合等(děng)相關資料(liào)可得幾(jǐ)何誤差尺寸如(rú)表 5 所示。
表 5 改造後夾(jiá)具的幾何誤(wù)差
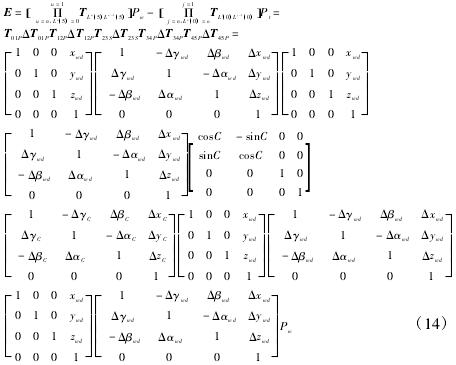
將以上數據帶入式( 14) 中得到如下:
按著在轉台 0°和 90°的位置這 2 個位置測試(shì),用銑刀沿回轉中心對稱向加工兩(liǎng)個方形槽,兩個方向方形槽相交打透,當考慮工件坐標係誤(wù)差單一因素時,可得在工件(jiàn)坐標(biāo)係中工件坐標原點的(de)誤差取值範圍如下:
Δx = [0. 391,0. 498],Δy = [0,0. 498],Δz = [0,0. 498]
由此可以看出,經過改進後的夾具係統基本(běn)上滿足木(mù)工加(jiā)工精度 0. 5mm 的要求。
6 、結束語(yǔ)
針對榫卯數控加工中心的夾具(jù)係統利用螺栓定位造成的(de)加工誤差,利用多體(tǐ)係統運動學理論來構建榫(sǔn)卯加工(gōng)中心夾具係統誤差模型,並通過理論分析(xī),可以看出:
①該方法(fǎ)簡單、明確,具有廣泛的通用性;
②該(gāi)方法的相鄰低序體之間的特征矩陣的形成具有很好(hǎo)的規律(lǜ)性(xìng),能夠簡單明確的描述機械係統,並對夾具係統進行誤差建模分析;
③螺栓隻能用於兩物體之間的連接(jiē),在夾具體係統中利用螺栓定位,會給加工造成比較大的誤差;
④改變具體結構堆積層數,並(bìng)改變定位方式,能較大的減少夾具(jù)係統(tǒng)的誤差,達到加工效果;
⑤本文中的夾具係統的轉台為外購件,提高轉台本身的精度,對整個夾具(jù)係統精度的提高有著重(chóng)要的影響(xiǎng)。
投稿箱:
如果您有機床行(háng)業、企業(yè)相關新聞稿件發表,或(huò)進行(háng)資訊合作,歡迎(yíng)聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行(háng)業、企業(yè)相關新聞稿件發表,或(huò)進行(háng)資訊合作,歡迎(yíng)聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息
")
業界視點(diǎn)
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產(chǎn)量(liàng)數(shù)據
- 2024年11月 軸承(chéng)出口情況
- 2024年11月(yuè) 基本型(xíng)乘用車(轎(jiào)車)產量數據
- 2024年11月(yuè) 新能源汽車產量數據
- 2024年11月 新能源汽車銷量(liàng)情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口情況(kuàng)
- 2024年10月 分地區(qū)金屬切削機床產量數據(jù)
- 2024年10月 金屬切削(xuē)機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據(jù)
- 2028年(nián)8月(yuè) 基本型乘用車(轎車)產量數據