



摘(zhāi)要:主軸定向功(gōng)能指的是使主軸在指定的位置停止。其方法有(yǒu)兩種,第一,利用主軸控製單元;第二,使用機械(xiè)檔塊(kuài)。主軸定向是數控機床的重要功能,特殊形狀工件裝卡以及刀庫換刀等情況都(dōu)可使(shǐ)用該功能。本(běn)篇文章主要講解主軸控製單元實現主軸定向方法和實例。
關鍵詞:數控機床;FANUC數控係統(tǒng);主軸;定向
0 引(yǐn)言
主軸定向(xiàng)是FANUC係統的基本功能,在FANUC 0i-TB、0i-TC 、0i Mate-TC、18i及以上版本(běn)都可以實現,但設(shè)置其參數有些技巧,本篇文章是在實際使用和翻讀係統資料的過程中總結歸納出的方法和技巧。
FANUC 0i係列和18i等係列數控係統都有主軸定向功能,可隻能在安(ān)裝主軸編碼器並連接串行主軸時使用。本篇文章用FANUC 0i-TC係統作為範例,講述主軸定向編(biān)製梯圖、設置參數和調(diào)整(zhěng)方法。
1.主軸定向(xiàng)梯圖
1.1 定向信號
G70.6:主軸定(dìng)向的控製信號。
F45.7:主軸定向的完成信號(hào)。
SHA00-SHA11(G78,G79.0-G79.3):停止的位置外部設定信號
1.2 定向梯形圖
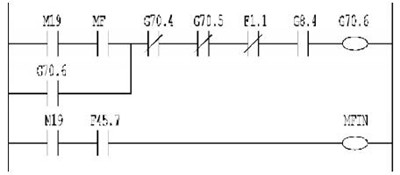
圖1 主軸準停基本(běn)梯圖
1.3 在圖(tú)1中M19的指令是M19;M指令的選通信號(hào)是MF;M指令的應答信號是MFIN;主軸的正轉(zhuǎn)信號是G70.4;主軸的反轉信號是G70.5;複位信號是F1.1;急停信號是G8.4。
主軸(zhóu)定(dìng)向後,存在G70.6自鎖,主軸在一個固定(dìng)的位置帶使能停止,即使有外力(lì)主軸(zhóu)也不能旋轉,此時可裝卡工件。如果(guǒ)想斷(duàn)開自鎖可以旋轉主(zhǔ)軸、複位或急停。
1.4 用參數設定主軸(zhóu)定向的位置偏移,可參考參數含義章節(jiē);還可以利用PMC 控製主軸定向停止位置外部設定信號G78- G79;一般(bān)用PMC 控製多點定向位位置更加便捷。
SHA00-SHA11是設定值範圍為0~4095的12位控製信號(hào),利用公式換算成角(jiǎo)度如下:
S =X ×360÷4096
PMC信號(hào)設定值是(shì)X,偏移角度是(shì)S。
在數(shù)控立式蹄片車床VTC5060上,因為卡盤同時裝(zhuāng)卡兩個工件,兩點位置(zhì)需要相差180°,所以(yǐ)用2個鍵選(xuǎn)擇兩個(gè)位置。圖(tú)2是梯圖程序。G79.3信(xìn)號值是2048,換算成角度是(shì)180°。所以相差180°的兩個位(wèi)置可以通過控製(zhì)通斷實現。偏移角度使用參數D0控製。圖中(zhōng)兩個定位位(wèi)置的選擇信號是180D和0D。
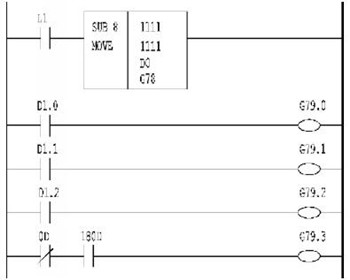
圖2 主軸定向位置外部設定(dìng)梯(tī)形圖(tú)
2.參數設置
2.1參數含義
2.1.1 3702:#2,3表示是定位停止位(wèi)置外部設定(dìng)功能(néng)是否使用(#2是第一主軸,#3是第二主軸(zhóu));
2.1.2 4001:#4表(biǎo)示主軸編碼器安裝方向。編碼器與主(zhǔ)軸(zhóu)轉動方向相同,設置0;如果不(bú)相同設設置1;
2.1.3 4002:#1可以設(shè)置是否使用(yòng)主軸編碼器。需要主軸(zhóu)定位時,設置為1。
2.1.4 4003:#0表示選擇定位(wèi)編碼器(為(wéi)0表示(shì)主(zhǔ)軸定向用位(wèi)置編碼器;為1表示用(yòng)磁性編碼器);
2.1.5 4003:#2,3表示主軸定位時的轉動方向;
2.1.6 4015:#0表示(shì)主軸定位功能是否使用(如果使用定向(xiàng)功能,請將此位設為1);
2.1.7 4017:#7表示定位過程中是否尋找最短路徑;
2.1.8 4031:停止的(de)位(wèi)置(zhì)。用主軸編碼器進行主軸定位時,使用此參(cān)數設定停止位置。如果使用主軸(zhóu)定位停止位置SHA00~SHA11外部設定功能(néng),此參數無效(xiào);主軸定位使用主軸編碼器時,可以用此(cǐ)參數設定停(tíng)止位置;
2.1.9 4038:表示主軸定(dìng)位的速度。通過4056~4059參(cān)數設置主軸定向時主(zhǔ)電(diàn)機的轉速,通過數控(kòng)係統的計算得到不同檔位定(dìng)位(wèi)時的主軸(zhóu)轉速(sù)。當此參數設置0時,主軸速度見下麵公式:
Nori=60×GEAR×PG×Rori
Nori:表示主軸定位速度
GEAR:表示主電機與主軸的傳動比(bǐ)(通過4056~4059參數設置)
PG:表示(shì)主軸定位位置增益(通過4060~4063參數設置)
Rori:主軸定位電機速度倍率(通過4076參數設(shè)置)
2.1.10 4042,4043:CTH1A 值為1,4043 參數(shù)生效;CTH1A(G70.3)值為0,4042參數生效;表示主軸定位(wèi)速度環比例增(zēng)益;
2.1.11 4050,4051:CTH1A值為1,4051生效;CTH1A(G70.3)值為0,4050參數(shù)生效;表示主軸定(dìng)位速度環積分增益;
2.1.12 4056~4059:表示各高低檔(dàng)位主電機與主軸的齒輪(lún)比;
2.1.13 4060~4063:表示主軸定位各高低檔位(wèi)位(wèi)置環增益;
2.1.14 4076:表示主軸定位電機的速度倍率;
2.1.15 4077:表示主軸定位位置偏移量;設定值範圍是0~4095;計算公式是:偏移量=設(shè)定值/4095 × 360°;
2.2.參數設置(zhì)
2.2.1 如果安裝主軸編碼(mǎ)器,將(jiāng)4002#1 號參數設為1,為4038參數設個值,一般設置40,為4056到4059號參數設置值,參數依據主軸各檔位傳動比設置(zhì),然後就能夠實現(xiàn)主軸定向;
2.2.2 如果仍不能實現主軸定向功能,先更改(gǎi)4001#4號參數,按照上文修改編碼器安(ān)裝方向的參數設置,再按照上文參數含義檢查相關參數的設(shè)置,然後將總電源斷電重啟係統後再(zài)執行主軸定向操作;
2.2.3 如果經過按照上麵一(yī)條說明所講述的方法仍然不能夠實現主軸(zhóu)定向功能(néng)。那麽可能是由於個別參(cān)數設置調整後與主軸不相匹配造成(chéng)的結果,此時應該手動將4000到4134號參數全部依次清零,如果個別(bié)參數值不能清除掉,先不用理會(huì),然後斷開總電(diàn)源。係統重新上電後,可依據(jù)主電機的型號重新設定4019#7和4133號(hào)參數,再一次生成主軸的參數。再次斷開電源後,重新按照上麵2.2.1和2.2.2所講述的方(fāng)法調(diào)整參數,然後就可以(yǐ)實現主軸(zhóu)定向功能了,如果仍然不能實現,此時需(xū)要檢查編碼器和編碼器接線是否存(cún)在問題;
2.2.4 主軸定向(xiàng)是主軸旋轉速度不能太低,要不然就無法找到(dào)定向位置。一般情況(kuàng)下,主軸定向時速(sù)應該在10到25轉之間,因主軸定向過程中並不(bú)檢測卡盤(pán)是否卡緊的信號,所以在可以實現主軸定(dìng)向功能情況下(xià),主軸定向的旋轉速度盡可(kě)能低,避免造(zào)成危險傷害(hài)。還要說明的是,機床(chuáng)安裝調試第(dì)一次通電後第一次執行主軸的定向功能所需要的時間稍長一些,在此後執行此(cǐ)功(gōng)能一(yī)般情況下一轉內可完成。
3.主軸定向應用(yòng)
執行主軸定向功能,如果想操作方(fāng)便可以使用按鈕控製主(zhǔ)軸定向,也可(kě)用標(biāo)準(zhǔn)M代碼M19來操作(zuò)執行;如果需要多點位定(dìng)向功能,可(kě)以使用工件加工程(chéng)序來改變
定向位置,操作方法見下麵步驟:
3.1 使用用可編程(chéng)參數輸入(rù)G10語句,實現(xiàn)主軸定向位置在加工程(chéng)序中的偏移,G10語句格式(shì)見表1。
3.2 對於固(gù)定幾點準停,可用主軸定向停止位置外部設定功能,用M指令改變準(zhǔn)停的點,這需要在梯形圖中實現此功能。
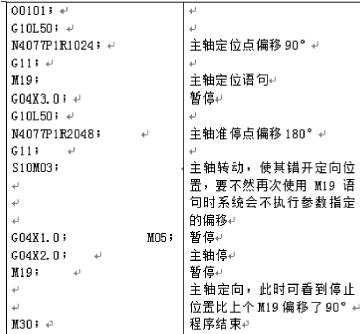
3.3 用加工程序改(gǎi)變準停位置的示(shì)例程序見表2。
表1 G10語句說明
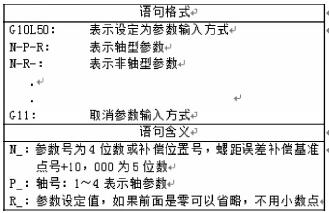
表2 示例程序
4.結束語
主軸定向功能是(shì)一個很常用並且實用的功能,在數控機床使用加工過程中具有重要應用價值,如(rú)本篇(piān)文章能(néng)為大(dà)家在工作中起到(dào)些幫助和啟(qǐ)示,那就(jiù)是是本文的意義所在。
如果您(nín)有機床(chuáng)行業、企業相關新聞稿件發(fā)表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com

")
- 2024年11月 金屬切削機床產量數(shù)據
- 2024年11月 分地區金(jīn)屬切削機床產量數據
- 2024年11月 軸承出口情(qíng)況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月 新能(néng)源汽(qì)車產量數(shù)據(jù)
- 2024年11月 新(xīn)能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月 軸承出口(kǒu)情況
- 2024年10月 分地(dì)區金屬切削機床產量數據
- 2024年10月 金屬切削機(jī)床產量數(shù)據
- 2024年(nián)9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據