")



數控機床進給軸位置精度(dù)的測量與優化
2021-3-8 來源: 武警海警學(xué)院機電管理係 作者:楊少兵 陳忠維
摘要 數控機床進給軸(zhóu)位置精度對加工精(jīng)度具有重要影響。通過使用雷尼紹(shào)XL-80型激光幹涉儀測量某型數控(kòng)車床X、Z軸的定(dìng)位誤差數據,利用軟件分析得到反向(xiàng)間隙補償值和螺距誤(wù)差補償值,並在西門子840D sl數控係統中進行反向間隙補(bǔ)償和螺距誤差補償;兩進給軸誤差補償前後位置精度(dù)的實際測(cè)量結(jié)果表明,其定位精度和重複(fù)定位精度得到了顯著(zhe)的提高。
關鍵詞(cí) 數控機床;進給軸位置精度;激光幹(gàn)涉儀;反(fǎn)向間隙補償;螺距誤差補償
數控機床加工精度主要由加工刀(dāo)具與工件間穩固的相對位置決定,而進給軸位置精度是刀具與工件相對位置的基本決定因素。因此,提高機床進(jìn)給軸的位置精度,對提高工件的加(jiā)工品質具有重要意義。機床進給軸的位置精度主要表現在滾珠絲杠反向間隙(xì)、直線運動軸定位精度及(jí)重(chóng)複(fù)定(dìng)位精度 3 個方麵。在機床(chuáng)裝配調試與運(yùn)行管理維護過(guò)程中,通常使用數控係統軟件補償方式,以消除因零部(bù)件製造誤差、裝配誤差、運行磨損等引起的進給軸直線運動位置誤差,如反向間隙、螺距誤差等(děng),進而提高進(jìn)給軸的位置精度。
本文以某(mǒu)型配備西(xī)門子 SIMUMERIK840D sl 係統的機床為研究對象,其數控係統配備(bèi)PCU 50.5-C控製單元、NCU 710.2數控單元;進給軸 X 有效行程為 1100 mm,測量裝置(zhì)為海德漢LS187C-1340型光柵尺;Z軸有效行程(chéng)為370 mm,測量裝(zhuāng)置為海德(dé)漢 LS187C-440 型(xíng)光柵尺。在(zài)其精(jīng)度調試(shì)過程中,使用雷尼紹 XL-80 型(xíng)激光幹涉儀實現對直線運動軸 X 與 運動位置精度的測
量;基於對應的(de)運行誤差數據(jù),求得相應進給(gěi)軸滾珠絲杠的反向間隙補償值和螺距誤差補償值,並在數控係統中對(duì)反向間隙和螺距誤(wù)差(chà)進行軟件補償,以實現提高X、Z軸位置(zhì)精度(dù)的目的。
1 、進給軸位置誤差測量
使用激光幹涉儀XL-80測量係統的線性測長組(zǔ)件測量進給軸的位置(zhì)誤(wù)差,主(zhǔ)要包括(kuò)激光頭、補償(cháng)器、帶雲台的三(sān)腳架及線性測量鏡組。線性測量鏡組主要由分光鏡、線性反射鏡(jìng)及(jí)光靶組成。數據采集與分析分別(bié)使用專用的線性測長軟件與數(shù)據分析軟件。下麵(miàn)以X軸為例,介紹進給軸位置誤差(chà)測量。
1.1 激光幹涉儀測(cè)量準備
測量 X 軸線性位移時,主要測量組件(jiàn)在機床上的基本布置如圖1所示。應先做好測量前的準備工作。
1)在X軸運行方向前方穩固地架設好(hǎo)三腳架與雲台,在(zài)雲台上固定好激光頭,調整(zhěng)位姿微調旋鈕,使各個方向(xiàng)的調整行程(chéng)處於中間位置。
2)連接好激光(guāng)頭電源及溫度(dù)、濕度傳感(gǎn)器,打開(kāi)電源(yuán)開關,轉(zhuǎn)動激光頭光閘,使射出的激光束最細;調節三腳架位置(zhì)與腳的高度,配合(hé)使用係統自帶的微型水平儀,使(shǐ)激(jī)光頭水平,且(qiě)射出的激光束與X軸運行方向基本平行。
3)將 X 軸滑台移動到離激光(guāng)頭最近的位置,在滑台上固定好反射鏡;調整磁力表座位置和高度,配合使用微型水(shuǐ)平儀與(yǔ)光靶,使(shǐ)反(fǎn)射鏡水平,且激光(guāng)正中光靶靶心。
4)利用(yòng)手輪緩(huǎn)慢移動滑台遠離激光頭,調整雲台的左右角度,使光點向相反(fǎn)方向偏離光靶中心大(dà)致相(xiàng)同的距離;移動滑台靠近激光頭,調整雲台的左右位置,使激光束正中反(fǎn)射鏡靶心。
5)重複過程 4),直至 X 軸移動過程中激光束始終擊中反射鏡(jìng)靶心(xīn)而不偏(piān)離,此時激光束(shù)與 X軸運(yùn)行方向已完全(quán)平行;去掉光靶,旋轉激光頭閘至工作位置,反射(shè)光束應(yīng)全部射入激光接收(shōu)孔,激光頭5個信號強度指示燈應至少點亮4個。
6)在激光頭與反射鏡之間的合適位置固定好分光鏡,將分光鏡(jìng)分光到(dào)反射鏡的一側用光靶蓋住(zhù),調整磁力表座位置(zhì)與高度,使分光鏡的反射光束完全射入激光頭接收(shōu)孔,且信(xìn)號強度指示燈至少點亮4個。
7)取下分光鏡分光到反射鏡一側的光靶,此(cǐ)時激光束應通過分光鏡至反射鏡,反射(shè)後光束再次回到分光鏡,並與分光鏡(jìng)上的反射光(guāng)束產生幹涉,幹涉(shè)光束被激光頭接(jiē)收,接收信號強度指示燈應至少點亮4隻。測量(liàng)準備工作完成。
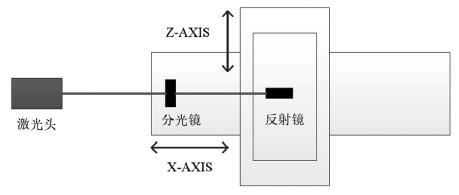
圖1 測量X軸線性位移主要(yào)組件在(zài)機床(chuáng)上的基本布置圖
1.2 數據測量
激光幹涉儀安裝就(jiù)緒後(hòu),編寫專門用於數據測量的機床運行程序(xù),並設置好數據采集軟件,運行數控(kòng)程序,便可實現數據的自動采集。數據測量(liàng)前,應在數控係統中將反向(xiàng)間隙值設置為
0,即MD32450 BACKLASH[1]=0;禁止螺距誤差補償,即32700 ENC_COMP_ENABLE[1]=0 。
1.2.1 機床進給軸測量運行程序
機床 X 軸有效行程(chéng)為 1100 mm,絕(jué)對坐標位置為-450.000~+650.000,數據(jù)測量間隔為100 mm,每一行程共測量 11 個點(diǎn)的數據。故設置數控程序起始點(diǎn)為-400、終止點為600,每運行(háng)100 mm停止 4 s,等待激(jī)光幹涉儀采集數據;滑(huá)台(tái)運行到兩端後越程 4 mm 返(fǎn)回,共運行 5 次。數控(kòng)程序如下:
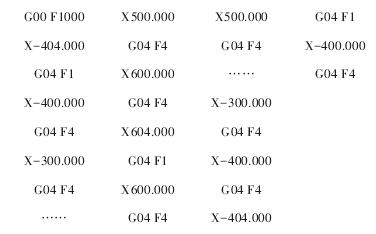
啟動數控程序,當滑台從-404 mm 運行到-400 mm位置、即在第一個GOF4處時,暫停程序,待設(shè)置好數據采集軟件後再開始運行(háng)。
1.2.2 線性位移數據采集與分析
啟動電腦上(shàng)的(de)線性測長軟件,按照提示的步驟,進行數據采(cǎi)集參數設置。設置(zhì)第一(yī)定位點0 mm、最終定位點1000 mm,間距值100 mm,精度為小數點後3位;設置測量定位方式為線性定位,測量次數為 5 次,方向為雙向(xiàng);填寫測(cè)量時間、地點等(děng)信息;數據采集方式、停止周期、越程大小等為(wéi)缺省值。完成上述設置後,軟件自動(dòng)開(kāi)始測量(liàng),自動采集的第一個數據為 0.000 mm
。此時啟動數控程序,軟件便自動在每個暫停時間段采集相應的線性位移數值,直至全部 55 個點的數據采(cǎi)集完(wán)畢。
打開數據分析軟件,X軸線性測長誤差曲線如圖2所示(shì),其中橫(héng)坐標表示測量目標值、縱坐標表示(shì)實測值(zhí)與目標值的差值。
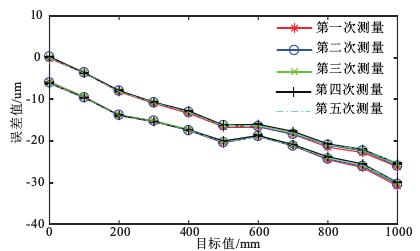
圖2 X軸線性測長誤(wù)差曲(qǔ)線
在“分析數(shù)據”菜單中選擇“ISO 230-2 1997統(tǒng)計(jì)數表”項,用軟件計算出實際的各項誤差值。可以得到,X軸反向間隙為(wéi)6.1 μm、重複(fù)定位精度為6.8 μm、定位精度為(wéi)31.4 μm。
2 、反向間隙補償與螺距誤差補(bǔ)償(cháng)
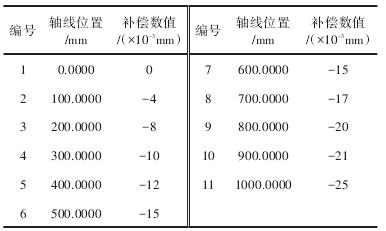
根據測(cè)得的實際誤差值,利用數據分析軟件,得到補償數據。在“分析數據”菜(cài)單中選擇“誤差補償圖表”,設置圖表類(lèi)型為(wéi)“均值補償”,補償類型(xíng)為“絕對值”,補償分辨率為0.001 mm,正負符號轉換為“誤差值”,補償起點為0、終點為1000 mm,間隔為 100mm。然後單(dān)擊“繪製誤差補償圖表”,得到軸反向間隙補償數據為-0.0004 mm。螺距誤差補償數據如(rú)表1所示。
表(biǎo)1 X軸螺距誤差補償數據
2.1 反向間(jiān)隙補償
根據上述誤差數據,將反向間隙補償(cháng)值輸入到(dào)數控係統中,即MD32450 BACKLASH[1]=-0.004,然後按 Reset,機床回參考點後反向間隙補償(cháng)生效。
2.2 螺距誤差補償
根據西門子(zǐ) 840D sl 數控(kòng)係統螺距誤(wù)差補償使用說明(míng),按如下步驟進行螺距誤差補償:
1)根據“誤差補償圖表”編製(zhì)補償文件,文件名為(wéi)X-BUCHANG.MPF,如表2所示。
表2 X軸誤差補償(cháng)文件
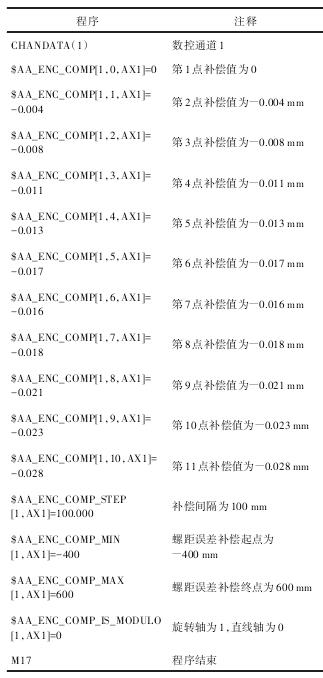
注:方括號內第 1 個“1”代表(biǎo)測(cè)量係統為(wéi)光柵尺、第 2 個(gè)數字代表補(bǔ)償點,“AX1”表示軸1,即X軸(zhóu)
2)計算補償點數(shù)N:

式中:Cmax表示補償位置坐標上限(xiàn),Cmin表示補償位置坐標下限,C 表(biǎo)示(shì)補償間距。
根(gēn)據(jù) X 軸實際(jì)情(qíng)況,其補(bǔ)償(cháng)點數 N 為 11。在數控係統中設置(zhì)參數 MD38000[1]=11,方括號中的“”表示(shì)機床采用光柵尺作為測量係統(tǒng)。修改參數MD38000時應注意數據備份。
3)設置參數 MD32700=0,將上述螺距誤差補償文件 X-BUCHANG.MPF 拷貝(bèi)到數控係統中,並執行一次;再將 MD32700 設置為 1,按複位鍵,機床回參考點,螺距(jù)誤差補償功能立即生。
3、 誤差補償前後進(jìn)給軸位置精度對比
X 軸反向間隙補償和螺距誤差補償生效後,使用 XL-80 激光(guāng)幹(gàn)涉儀再次測(cè)量該軸的位(wèi)置(zhì)精度,其線性測長誤差曲線如圖3所(suǒ)示。
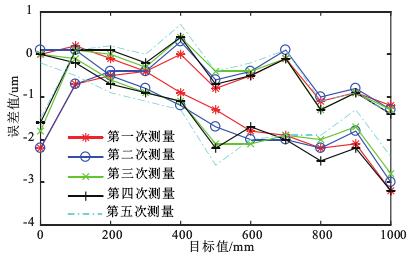
圖3 X軸誤差補(bǔ)償後線性測長誤差曲線
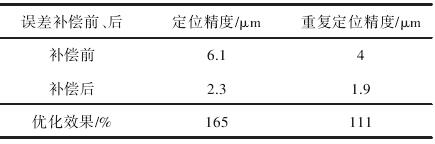
X 軸進行(háng)誤差補(bǔ)償前後(hòu),其位置精(jīng)度數值如表 3 所示,定位精度提高了 598%,重複(fù)定位精度提高了106%。該機床 Z 軸有效行程(chéng)範圍為−330~40 mm,設置補償初始位置為−300、終止位置為0,間距為50 mm,共補償(cháng) 7 個點(diǎn)。按照 X 軸補償方法(fǎ),對 Z軸進(jìn)行反向間隙補償與螺距誤差補償(cháng)。如表4所示,補償後定位精度提高了 165%,重(chóng)複定位(wèi)精度提高了111%
。
表3 X軸誤差補償前後位置精度對比
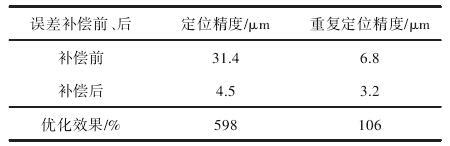
表4 Z軸誤差補償前後位置精度對比
4 、結束語
在新機床的裝配調試與舊機床的維護保養中,利用激光幹涉儀測量進給軸(zhóu)的位置(zhì)誤差,並在(zài)數控係(xì)統中進行反向間隙補償(cháng)和螺距誤差補償,能(néng)有效地提高進給(gěi)軸的位置精度。這項工作對提高加工質量、節(jiē)約經費(fèi)等(děng)具有重要意義。本文講述的機床進給軸位置誤差補(bǔ)償方法(fǎ)和過程具有普遍性(xìng),不同的測量方法、不同(tóng)的數(shù)控係(xì)統,均(jun1)能實現軟件誤差補償功能,應在機床的調試和(hé)維護中大力普及和推廣。
投稿箱:
如果您有(yǒu)機床行業、企業相關新聞稿件發表,或進行資訊(xùn)合作,歡(huān)迎聯(lián)係本網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com
如果您有(yǒu)機床行業、企業相關新聞稿件發表,或進行資訊(xùn)合作,歡(huān)迎聯(lián)係本網編輯部, 郵箱(xiāng):skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多
牌調查")
行業數據
| 更多
- 2024年11月 金屬(shǔ)切削機床產量數(shù)據
- 2024年11月(yuè) 分地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基(jī)本(běn)型乘用車(轎(jiào)車)產量數據(jù)
- 2024年11月 新能源汽車產量數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據(jù)
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量數據
- 2024年(nián)10月 金屬切削機床產量數據(jù)
- 2024年9月 新(xīn)能(néng)源汽車銷量情況
- 2024年8月 新能源汽車(chē)產量數據
- 2028年8月(yuè) 基本型乘用車(轎車)產量數據