



基於五軸機(jī)床空間運動分析(xī)的後處理研究
2013-12-22 來源(yuán):數(shù)控機床市場網 作者:陳良驥劉元朋(péng)
摘(zhāi)要!針對五軸加工時從刀(dāo)位文件到數(shù)控程序的(de)後處理(lǐ)問題"以雙轉台類型的五軸機床(chuáng)為(wéi)例建立了由參考坐標係到(dào)工(gōng)件(jiàn)坐標係之間的中間坐標係"基於對各坐標係運動情況的分析最終得到了(le)由(yóu)參考(kǎo)坐標係(xì)到工件(jiàn)坐標係的坐標變換矩陣"從而將(jiāng)五軸後處理過程簡化為求解一個關於機床(chuáng)控製坐標的(de)線性方(fāng)程組#,實際計算結果表明所提出方法是正確可行的而且適用於其他任(rèn)何類型的(de)五軸機床.
關鍵詞:數控五軸加工坐(zuò)標變換後處理
五軸聯動(dòng)的刀位文件中的刀位數據既包含刀心點坐標(biāo)也(yě)包含刀軸方(fāng)位的單位矢量"這種刀位文件通常是以工件固定&刀具運動的方式得到的% 而實際加工中"五軸機床結構類型有很多種"不同類型機床所(suǒ)需要的數(shù)控代碼也不同.因此(cǐ)"五軸聯動刀位文(wén)件(jiàn)隻(zhī)是一種中性文件"它能為各(gè)種類型的機床提供同一的刀具運動軌跡的數據% 要完成曲麵的五軸加工(gōng)還必須對刀位文(wén)件進行後處理成(chéng)適合於各(gè)種類型五軸機床的(de)數控(kòng)代碼(mǎ).為解決從刀位到數控(kòng)代碼(mǎ)的轉換問題"現行的後處理方法一般根據圖形的方法進行分析 但具(jù)體實現這些方法時卻往(wǎng)往感到不容易直觀理解而且極易出錯.區(qū)別於現(xiàn)行的後處理(lǐ)方法本文將對雙轉(zhuǎn)台(tái)型五軸數控機床進行運動學分析和建模並進行後處(chù)理的研究.
1、雙轉台型五軸機床及其坐標係
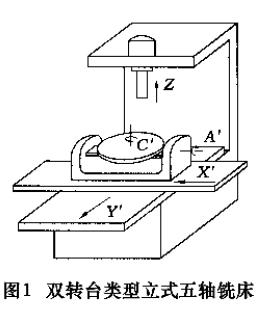
圖1為(wéi)一種回轉坐標均由工作台實(shí)現的立式(shì)五軸銑床"如MIKRON公司的ucp係列五軸機床.其中:機床坐(zuò)標係X Y 軸由工作台實現Z軸平動由主軸帶動刀具(jù)上(shàng)下移動實現.擺動台(Tilting Table TT) 可以繞X軸(zhóu)擺動" 是為A軸( 一般進行上下90度範圍內的擺動) TT中間有一個回轉(zhuǎn)台(Rotating Table ,RT) " 在(zài)圖示位置上繞Z軸360度(dù)自由回轉"定義為C軸. 通過A軸與C軸的組合" 固定在RE上的工件除了底麵之外"其餘的W 個麵都可以由立式主(zhǔ)軸進行加工. 如(A C 軸與X Y Z三個直線軸實現聯動" 就可加工出複雜的(de)空間曲麵. Z Y Z A C 軸的運(yùn)動坐標分別為X' ( 加' , 表示運動由工作台實現) Y Z 不加' 表示運動由主軸實現A C 如圖1 所示.
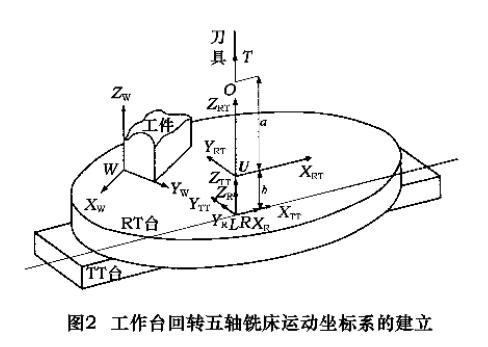
如(rú)圖2 所示"在(zài)加工初始時C軸軸線與(yǔ)刀具軸(zhóu)線( 刀軸單位矢量為T 共線且與A軸軸線(xiàn) RT台(tái)上表麵分別相交於L和U( 距離為b= L-U ,Z軸方向可測出刀心點(diǎn)O與U的(de)距離 a=O-U.分別建立(lì)如下各坐標係:機床坐標係在(zài)出(chū)廠(chǎng)時已確定;參考坐標係XR - YR - ZR,RCS 原點R與L點重合,各軸方向與機床坐標係一(yī)致(RCS係在加工過程中固定) ;擺動(dòng)台坐標係( XTT -YTT-ZTT TTCS) 與RCS係重(chóng)合(TTCS係不隨(suí)TT擺動,隻做X Y 方向的平動) ;轉動台坐標係( XRT-YRT-ZRT RTCS )建在(zài)U處各軸方向與RCS係一致(zhì)(RTCS係不隨RT轉動(dòng)但隨TT台一起擺動)
工件裝夾在RT上,定義工件的坐標係(XW-YW-ZW,WCS) 隨RT運動而運動( 本文假定工件裝夾完畢WCS係與RTCS係重合).
2、 雙轉台型五軸機床運動分析(xī)
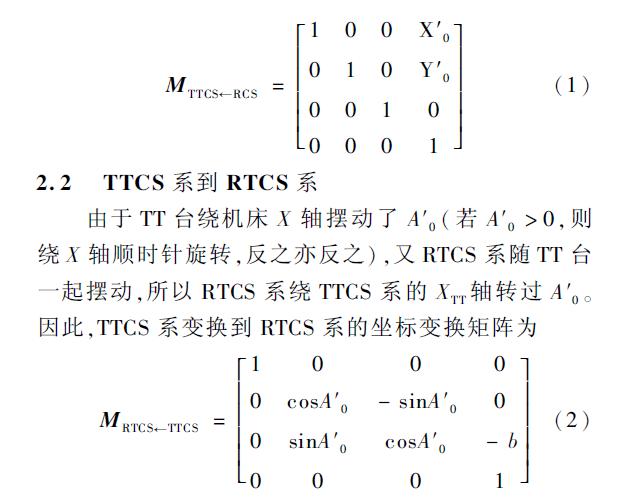
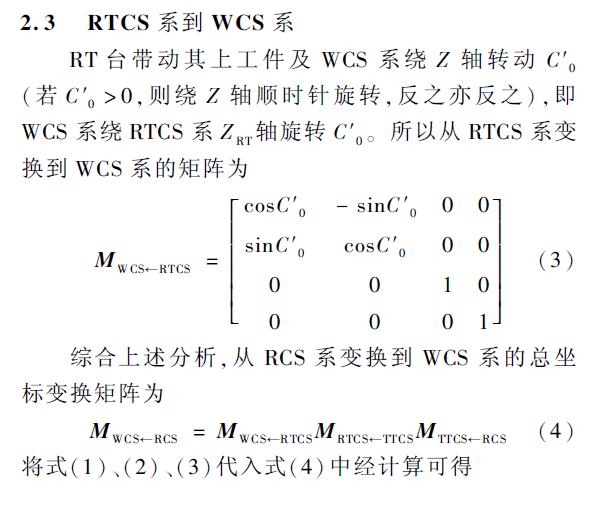
機床空間運動分析的目的是根據前麵建立的坐標係及其運動方式"計算出在加工過程中某時刻( 假定此時機床各軸的(de)坐標為  各坐標係之(zhī)間(jiān)的(de)坐標變換矩陣。
各坐標係之(zhī)間(jiān)的(de)坐標變換矩陣。




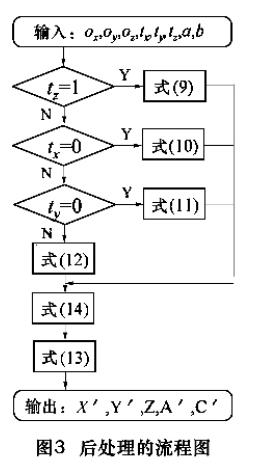
至此, 整個後處理過程可以歸(guī)納為如圖3所示算法流(liú)程.
4、實例計算與結果驗(yàn)證分析
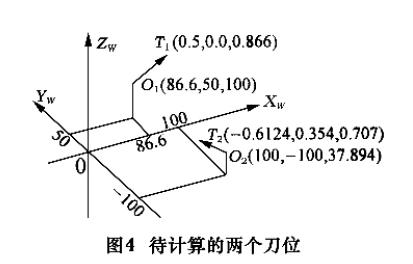
圖2 中假定a=450mm如圖4所示"假定在工件(jiàn)坐標係下有兩個相(xiàng)鄰刀位’刀位:1(01,T1)和刀位2(02,T2) "現應用(yòng)前麵介(jiè)紹的後(hòu)處理算法分別對兩個刀位計算其對應的加工代
碼.
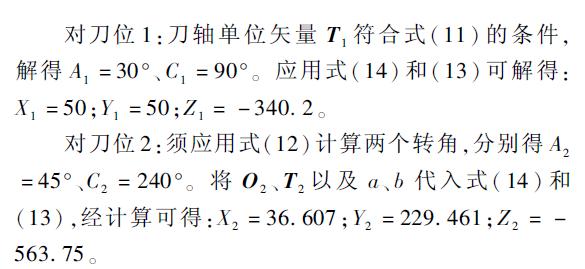
定出三個平移坐標分別(bié)為 X1=50 Y1=50 Z1=-340.2與計算出來的結果完全一致.
5 結語
本文(wén)以旋轉運動均由工(gōng)作台實現的雙轉台類(lèi)型五軸機床為例進(jìn)行了後(hòu)處(chù)理研究, 該方法同樣可以擴(kuò)展至其他類型的機床"進(jìn)行後處理(lǐ)時"可以先針對具體機床結構建立起相應的運動坐標係"然後給定機床各(gè)聯動軸的運動(dòng)坐標分析其各坐標係之間的坐標變化關係"最終(zhōng)建立起機床運動模型, 基於該模型可以給出機床運動坐標和刀(dāo)位文件中刀位的(de)關(guān)係"先(xiān)討論出轉動坐標"然後可通過解(jiě)一個線性方程組來求解(jiě)三個平動坐標, 通(tōng)過(guò)實際計算及結果(guǒ)分(fèn)析"能充分驗(yàn)證本文(wén)方法的正確性和可行性.(文自:鄭州航空工(gōng)業管理學院機電工(gōng)程係(xì) )
投稿箱:
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相(xiàng)關新聞稿件發表,或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切(qiē)削機床產量數據
- 2024年11月 分(fèn)地區金屬切削機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據(jù)
- 2024年11月 新能源汽車(chē)產量數據
- 2024年11月 新(xīn)能源汽車銷量情況
- 2024年10月 新能(néng)源汽車產量數據
- 2024年10月 軸承出口情況
- 2024年10月 分地區金屬切削機床產量(liàng)數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能(néng)源汽車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本(běn)型乘用車(轎車)產(chǎn)量數據